Compared with traditional industrial robots, CO collaborative robots have the advantages of safety and convenience, compact size, ergonomic principles, flexible scheduling and easy integration into existing production lines. In the collaboration area can directly interact with people, so that the production flexibility can be maximized, to meet the needs of more users, through robotics to enhance the level of production labor, reduce costs, improve competitiveness.

The CO Series Collaborative Robots (CO Series Cobots) are designed to seamlessly integrate human-robot collaboration into modern production environments. Unlike traditional industrial robots that typically require protective barriers and designated safety zones, CO cobots emphasize safety, flexibility, and ease of deployment, making them ideal for factories looking to boost efficiency while maintaining safe and ergonomic workplaces.
Key Advantages of CO Series Collaborative Robots:
- Enhanced Safety & Human Interaction
CO cobots feature advanced safety mechanisms and intelligent sensors, allowing them to work directly alongside human operators without additional guarding. They can detect force and contact, ensuring secure operation in collaborative environments. - Compact Design & Ergonomics
Built with ergonomic principles in mind, the CO series has a lightweight and compact structure, making it suitable for confined spaces or production lines with limited footprint. This ensures adaptability to various industrial applications without large-scale reconfiguration. - Flexible Scheduling & Easy Integration
CO collaborative robots are designed for quick deployment and reprogramming, enabling manufacturers to adjust production lines rapidly. Their plug-and-play integration with existing equipment reduces downtime and accelerates time-to-market. - Maximized Production Flexibility
By working safely alongside human operators, CO cobots significantly enhance production flexibility. They allow companies to meet changing demands, optimize workflows, and expand the range of tasks that can be automated without compromising safety. - Improved Efficiency & Competitiveness
With CO series robots, enterprises can reduce labor costs, improve process consistency, and elevate productivity. This directly translates to stronger market competitiveness and long-term operational advantages.
Applications of CO Series Collaborative Robots:
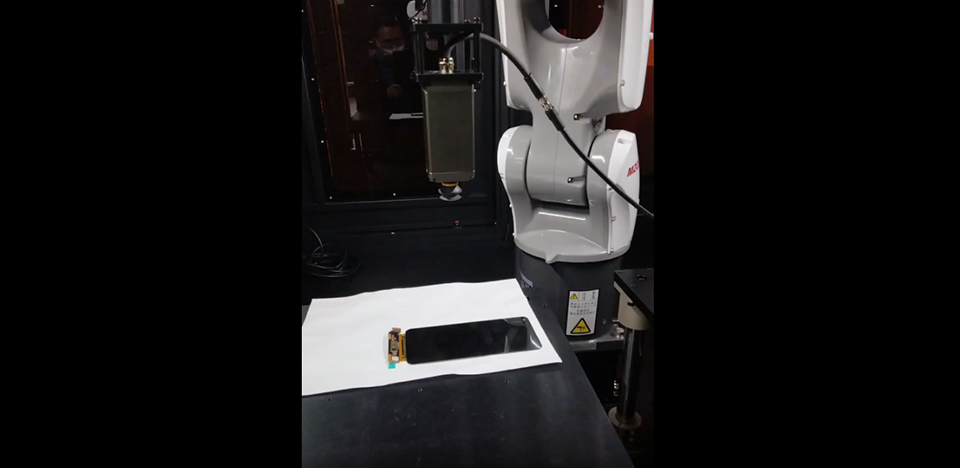
- Electronics assembly and testing
- Packaging and logistics
- Light manufacturing and inspection
- Machine tending and tool handling
- Precision screwdriving, welding, and polishing
The CO Series Collaborative Robots deliver the safety and convenience of cobots, combined with the efficiency and reliability of industrial automation, making them the ideal solution for companies aiming to achieve smarter, safer, and more flexible production.
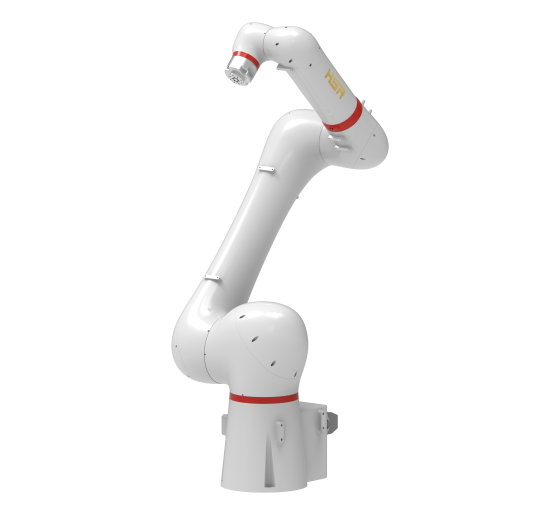
The new generation of collaborative robot HSR-CO605-1000 is safe, efficient, easy to use, compact, ergonomic, flexible scheduling and easy to integrate into existing production lines. In the collaboration area can directly interact with people, so that the production flexibility can be maximized, to meet the needs of more users, through robotics to enhance the level of production labor, reduce costs, improve competitiveness.
| Industrial Robots | HSR-CO605-1000 | |
|---|---|---|
| degree of freedom | 6 | |
| Rated load | 5Kg | |
| Maximum working radius | 1005mm | |
| Repeated positioning accuracy | ±0.02mm | |
| Range of motion | J1 | ±180° |
| J2 | -220°/ 40° | |
| J3 | -55° / 235° | |
| J4 | ±180° | |
| J5 | ±130° | |
| J6 | ±180° | |
| Maximum speed | J1 | 120°/s,2.09rad/s |
| J2 | 120°/s,2.09rad/s | |
| J3 | 150°/s,2.62rad/s | |
| J4 | 240°/s,4.19rad/s | |
| J5 | 240°/s,4.19rad/s | |
| J6 | 240°/s,4.19rad/s | |
| allowable moment of inertia | J6 | 0.41kg ㎡ |
| J5 | 0.30kg ㎡ | |
| J4 | 0.30kg ㎡ | |
| Allowable torque | J6 | 13.75Nm |
| J5 | 11.5Nm | |
| J4 | 11.5Nm | |
| Applicable environment | Temperature | 0~45° |
| Humidity | 20%~80% | |
| Other | ||
| Length of teaching pendant cable | 8 m | |
| Length of body-cabinet connecting line | 3 m | |
| I/O parameters | Digital quantity: 16-bit input, 16-bit output | |
| Body reserved signal line | 6 position (Hummor connector) | |
| Reserved gas path | – | |
| Power supply capacity | 2kVA | |
| Rated power/voltage/current | 1.2kW/DC48V/20A | |
| Protection grade of body/electric cabinet | IP54/IP20 | |
| Installation method | Ground, side, upside down | |
| Body/cabinet weight | 25kg/18kg | |
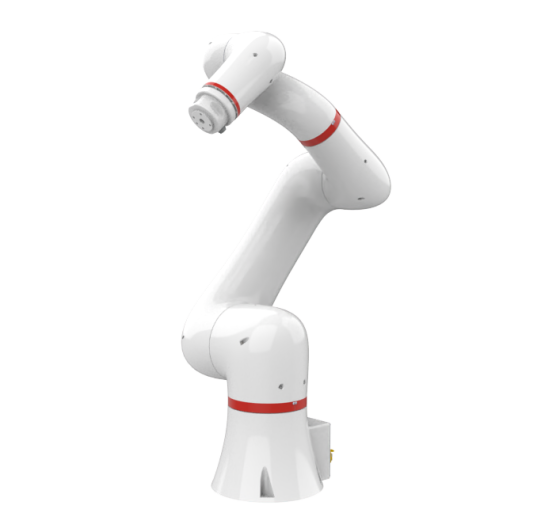
The HSR-CO610-1400 continues the consistent flexible modeling design and ergonomic design of CO series collaborative robots, with good interactive performance, safety and ease of use, larger range of motion and stronger load capacity, and is suitable for various application scenarios such as palletizing, loading and unloading, screw locking and payment, etc.
| Industrial Robots | HSR-CO610-1400 | |
|---|---|---|
| degree of freedom | 6 | |
| Rated load | 10Kg | |
| Maximum working radius | 1355mm | |
| Repeated positioning accuracy | ±0.04mm | |
| Range of motion | J1 | ±180° |
| J2 | -220°/ 40° | |
| J3 | -55° / 235° | |
| J4 | ±180° | |
| J5 | ±130° | |
| J6 | ±180° | |
| Maximum speed | J1 | 120°/s,2.09rad/s |
| J2 | 120°/s,2.09rad/s | |
| J3 | 150°/s,2.62rad/s | |
| J4 | 225°/s,3.93rad/s | |
| J5 | 225°/s,3.93rad/s | |
| J6 | 225°/s,3.93rad/s | |
| allowable moment of inertia | J6 | 1.15kg ㎡ |
| J5 | 0.90kg ㎡ | |
| J4 | 0.95kg ㎡ | |
| Allowable torque | J6 | 34Nm |
| J5 | 29Nm | |
| J4 | 30Nm | |
| Applicable environment | Temperature | 0~45° |
| Humidity | 20%~80% | |
| Other | ||
| Length of teaching pendant cable | 8 m | |
| Length of body-cabinet connecting line | 3 m | |
| I/O parameters | Digital quantity: 16-bit input, 16-bit output | |
| Body reserved signal line | 4 position (M8 plug connection) | |
| Reserved gas path | – | |
| Power supply capacity | 2kVA | |
| Rated power/voltage/current | 2kW/DC48V/30A | |
| Protection grade of body/electric cabinet | IP54/IP20 | |
| mount mode | Ground, side, upside down | |
| Body/cabinet weight | 41kg/18kg | |
The HSR-CO616-1100 continues the consistent flexible modeling design and ergonomic design of CO series collaborative robots, with good interactive performance, safety and ease of use, larger range of motion and stronger load capacity, and is suitable for various application scenarios such as palletizing, loading and unloading, screw locking and payment, etc.
| Industrial Robots | HSR-CO616-1100 | |
|---|---|---|
| degree of freedom | 6 | |
| Rated load | 16Kg | |
| Maximum working radius | 1055mm | |
| Repeated positioning accuracy | ±0.04mm | |
| Range of motion | J1 | ±180° |
| J2 | -220°/ 40° | |
| J3 | -55° / 235° | |
| J4 | ±180° | |
| J5 | ±130° | |
| J6 | ±180° | |
| Maximum speed | J1 | 120°/s,2.09rad/s |
| J2 | 120°/s,2.09rad/s | |
| J3 | 150°/s,2.62rad/s | |
| J4 | 180°/s, 3.14rad/s | |
| J5 | 180°/s, 3.14rad/s | |
| J6 | 180°/s, 3.14rad/s | |
| allowable moment of inertia | J6 | 1.54kg ㎡ |
| J5 | 1.38kg ㎡ | |
| J4 | 1.35kg ㎡ | |
| Allowable torque | J6 | 49Nm |
| J5 | 46Nm | |
| J4 | 45Nm | |
| Applicable environment | Temperature | 0~45° |
| Humidity | 20%~80% | |
| Other | ||
| Length of teaching pendant cable | 8 m | |
| Length of body-cabinet connecting line | 3 m | |
| I/O parameters | Digital quantity: 16-bit input, 16-bit output | |
| Body reserved signal line | 4 position (M8 plug connection) | |
| Reserved gas path | – | |
| Power supply capacity | 2kVA | |
| Rated power/voltage/current | 2kW/DC48V/30A | |
| Protection grade of body/electric cabinet | IP54/IP20 | |
| Installation method | Ground, side, upside down | |
| Body/cabinet weight | 38.5kg/18kg | |
…

EVS01 Electric Vacuum Actuator – Optimal Solution for Circuit Breaker Assembly
EPG40-100 Parallel Electric Gripper – Professional Tool Changer for CNC Automation
EVS01 Electric Vacuum Actuator – Smart Handling Solution for Mobile Phone Components

EPG-HP26-050 High Precision Electric Parallel Gripper – Ultimate Solution for Electronic Component Handling
ERG32-150 Electric Rotary Gripper – Precision Handling for Mobile Phone Parts