
感谢您使用钧舵 EPG-HP 系列高精度电动平行夹爪。
钧舵 EPG-HP 系列高精度电动平行夹爪,专注于高精度、高能量密度、高可靠性的即插即用末端电伺服夹持技术,是末端夹持方案的最佳选择.
- 驱控内置,机电控一体化
- 小体积、大夹持力,掉电保持
- 精准力控,大行程、范围可调
- 2 分钟配置,3 分钟使用,实时故障定
- 快速组网
- 信息反馈、工业互联
- 3C 电子
- 汽车制造
- 物流
- 食品
- 医疗
- 化妆品
- 其他
本手册为钧舵 EPG-HP 系列高精度电动平行夹爪手册,手册提供了产品的总体介绍、安装事项、通讯协议与控制、故障处理及保修事项等方面的说明。对于初次使用的用户,请务必认真阅读本手册。若对本手册内容有所疑惑,请咨询我司的技术支持人员以获取帮助。
- 本手册中的图例仅为了说明,可能会与您订购的产品有所不同。本公司致力于产品的不断完善,产品功能会不断升级,所提供的资料如有变更,恕不另行通知,可自行咨询。
- 若使用中有其他问题,请联系本公司各区域代理商或客户服务中心。
第一章 安全事项
- 本产品的适用性请由系统设计者或规格制定者来判断。
本产品的使用条件具有多样化,请由系统的设计者或规格的制定者来判断系统的适用性。必要时请通过分析和测试进行判断。
请在参考最新的产品资料、确认规格的全部内容、考虑到可能发生的故障,在此基础上构建系统。
- 请具有充分知识和经验的人员使用本产品。在此所述产品若误操作会损害其安全性。
机械装置的组装、操作、维修保养等作业请由具有充分知识和经验的人执行。
- 请务必在确认机械、设备的安全之后,再进行产品的使用和拆卸。
- 请在确认已进行了移动体的落下防止对策和失控防止对策之后再进行机械、设备的使用和维护。
- 请在确认已采取上述安全措施,并切断了能量源和设备电源以保证系统安全的同时,确认和理解设备上产品个别注意事项的基础上,进行产品的拆卸。
- 重新启动机械、设备时,请对意外动作、误操作采取预防措施。
- 在如下所示条件和环境下使用时,请在考虑安全对策的同时,提前向我司咨询。
- 明确记载的规格以外的条件或环境。
- 使用于原子能、铁路、航空、宇宙设备、船舶、军用、医疗设备、食品用设备、燃料装置、安全设备等场合,以及用于非产品手册中的标准规格的场合。
- 预测对人身和财产有重大影响,特别是在有安全要求的场合使用时。
- 用于互锁回路时,请设置应对故障的机械式保护功能,进行双重互锁。另外进行定期检查以确认是否正常作动。
第二章 总体介绍
2.1 产品基本信息
钧舵 EPG-HP 系列高精度电动平行夹爪的基本信息如下:
表 2.1 产品基本信息
| EPG-HP26-050 | 0~26mm | 5~50N | 0.45kg | 0.65s |
| EPG-HP50-050 | 0~50mm | 5~50N | 0.45kg | 0.70s |
警告:
本设备只能在以上技术数据规定内使用,否则属于不当使用范畴,凡因不当使用造成的任何伤害或损坏,本公司均不承担相应责任。
2.2 产品外观尺寸
以下为 EPG-HP 系列高精度电动平行夹爪的产品外观尺寸图,图中的尺寸采用特殊符号标注,具体尺寸可从图上清楚看出。
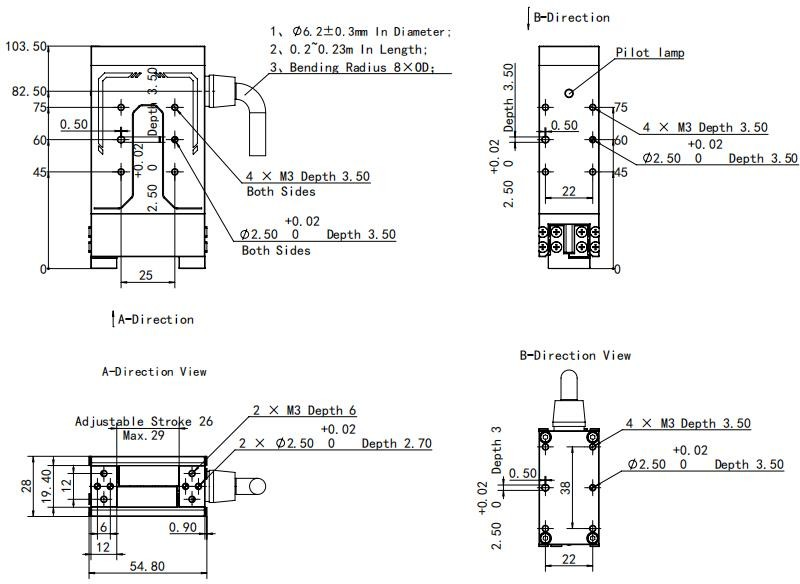
图 2-1 EPG-HP26-050 产品尺寸图
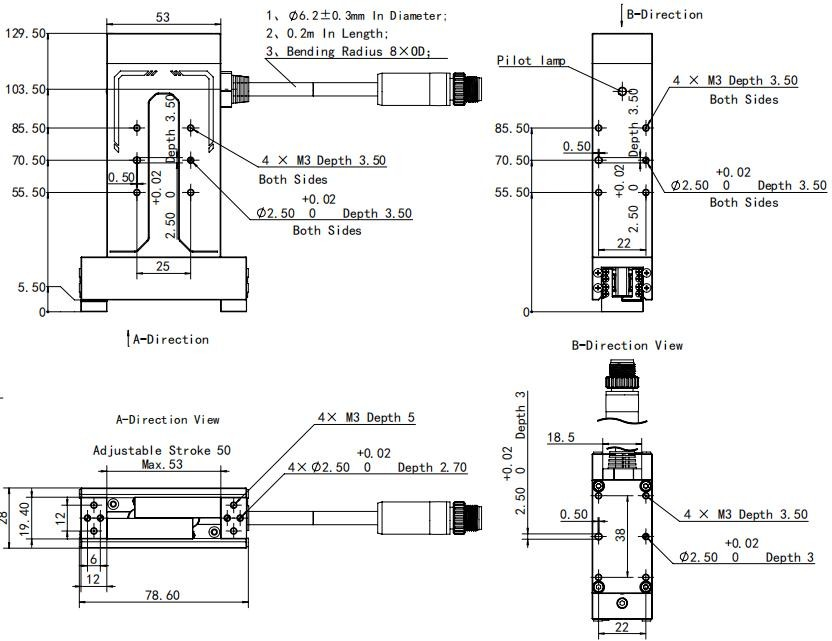
图 2-2 EPG-HP50-050 产品尺寸图
第 3 章 安装事项
在安装之前,请认真阅读电动夹爪相关安全说明(第 1 章 安全事项)。在固定好电动夹爪前,请勿提前打开电源。
3.1 使用条件
电动夹爪的操作及运输、存储条件为:
(1)操作环境温度: +5℃~+40℃;
- 操作环境湿度: 80RH%以下(无霜无结露);
- 运输及储存温度: 0℃ ~ +40℃;警告:
EPG-HP 系列高精度电动平行夹爪须远离振动及冲击环境,环境不含灰尘、烟尘或水,不含腐蚀性气体、液体或爆炸性气体,没有强大的电磁干扰源。夹爪表面的清洁度会影响对抓取物体的摩擦力,必须保持夹爪的清洁,远离碎屑污染源,并按厂家推荐的维护周期进行定期维护。
3.2 机械连接
使用钧舵 EPG-HP 系列高精度电动平行夹爪时,须将与电动夹爪的夹具进行连接且确保连接端面孔位与电爪的两侧面板或底部面板孔位一致,否则需使用转接部件进行转接。确保使用至少高强度的螺栓将孔位固定到位。
电爪的指尖可以根据不同应用场景和被夹取物品尺寸自行设计及替换。一般靠摩擦力抓取物品的时候,夹持力应大于物品重量的 10~20 倍,针对偏心夹取、精准定位、接触面不足,应预留更大夹持力。
安装说明:
- 主体固定时,请使用同一安装面上的所有螺栓孔固定;
- 拧紧螺栓。
对于每种操作模式,操作员都可以控制手指的力量和速度。仅通过一个“转到目标位置”命令即可完成运动。EPG-HP 高精度电动平行夹爪具有内部控制器,可以按照第 6 章所介绍的通讯协议向电爪发送控制指令调节速度和力,而手指的机械设计会自动适应物体的形状。
3.3 电气连接
钧舵 EPG-HP 系列高精度电动平行夹爪采用 DC24V 供电,支持 Modbus 通讯控制和I/O 控制。
表 3.1 8 芯线接口定义
| 针脚编号 | 线缆颜色 | 线缆定义定义 | 说明 | 延长线母头(插孔) |
| 1 | 白 黑粉黄棕橙绿 | 485A | 485 通信信号+ | |
| 2 | 485B | 485 通信信号- | ||
| 3 | OUT2 | IO 输出 2 | ||
| 4 | OUT1 | IO 输出 1 | ||
| 5 | DC24V | 直流电源 24V 正极 | ||
| 6 | IN2 | IO 输入 2 | ||
| 7 | IN1 | IO 输入 1 | ||
| 8 | 蓝 | DC0V | 直流电源 GND | |
| 负极 |
表 3.2 12 芯线接口定义
| 针脚编号 | 线缆颜色 | 线缆定义定义 | 说明 | 延长线母头(插孔) |
| 1 | 黑色 | 485B | 485 通信信号- | |
| 2 | 红色 | OUT COM | IO 输出公共地 | |
| 3 | 白注黑 | 485GND | 485 参考地 | |
| 4 | 粉色 | OUT2 | IO 输出 2 | |
| 5 | 绿色 | IN1 | IO 输入 1 | |
| 6 | 黄色 | OUT1 | IO 输出 1 | |
| 7 | 橙色 | IN2 | IO 输入 2 | |
| 8 | 黄注黑 | OUT3 | IO 输出 3 | |
| 9 | 紫色 | IN COM | IO 输入公共地 | |
| 10 | 白色 | 485A | 485 通信信号+ | |
| 11 | 蓝色 | DC0V | 直流电源 GND负极 | |
| 12 | 棕色 | DC24V | 直流电源 24V 正极 | |
| 金属壳 | 黄绿色 | 接地屏蔽/PE |
EPG-HP 系列高精度电动平行夹爪 IO 开关量信号类型,接线时可分别配置为 NPN 型(源型)或 PNP 型(漏型)。
表 3.3 接口参数
输入数量 2DI
输出数量 3DO
输出电流 Max.50mA
各信号类型接线示意图如下所示:
图 3-1 输入 NPN 型(源型)接线
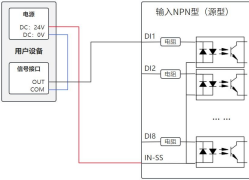
图 3-2 输入 PNP 型(漏型)接线
图 3-3 输出 NPN 型(源型)接线
图 3-4 输出 PNP 型(漏型)接线
注意事项:
- DI、DO 接口形式均为无极性干接点,若多个 DI 或 DO 信号同时连接时,需考虑公共端 IN-SS 和 OUT-SS 接法,建议公共端接电源。
- DI 或 DO 接线时需要形成正确回路,电路才能正常工作。
- 使用时请勿超过接口电气参数。
3.5 拓扑示意
RS485 接线
如现场有多个设备使用时,RS485 总线连接拓扑结构如下图所示。
图 3-5 RS485 拓扑示意图
图 3-6 菊花链连接结构
图 3-7 分支线连接
图 3-8 星型连接
注意事项:
- RS485 总线推荐使用带屏蔽双绞线连接,485+(485A)、485-(485B)采用双绞线连接;
- 所有节点 485 信号的参考地连接在一起(如有),也可不接,请勿接至 PE;
- 通信速率高、通信距离远,考虑在总线两端分别连接 120Ω终端匹配电阻,防止信号反射。如果通信速率低或者通信距离较近,建议不加终端电阻;
- 当节点数较多时,485 总线一定要是菊花链连接方式。如果需要分支线连接,总线到节点间的分支长度越短越好,建议不超过 3m。不要使用星型。
第 4 章 通讯与控制
4.1 基本说明
钧舵 EPG-HP 系列高精度电动平行夹爪采用 RS485 接口连接,采用 Modbus RTU 协议控制,支持 IO 控制。电动夹爪在通讯网络中作为 Modbus 从站使用,而向电动夹爪发送控制指令的上位机、PLC 或其他模块作为 Modbus 主站使用,本节旨在提供 Modbus 主站的配置说明。
Modbus RTU 的一般介绍和有关 CRC 算法的详细信息,请读者阅读 Modbus 相关规范和实施指南。
4.2 串口设置
下表 4.1 描述了使用Modbus RTU 协议控制钧舵EPG-HP 系列高精度电动平行夹爪的连接要求。
| 表 4.1 | 连接要求 | ||
| 名称 | 描述 | ||
| 物理接口 | RS-485 | ||
| 波特率 | 115200 bps(默认) | ||
| 数据位 | 8 bit | ||
| 停止位 | 1 | ||
| 奇偶校验 | 无 | ||
| 数据流控制 | 无 | ||
| 控制寄存器首地址 | 0x03E8(1000) | ||
| 状态寄存器首地址 | 0x07D0(2000) |
4.3 命令帧格式
钧舵 EPG-HP 系列高精度电动平行夹爪使用标准 Modbus-RTU 协议,其报文格式如下:
表 4.2 报文格式
| 设备地址 | 功能代码 | 数据格式 | CRC 校验码 |
| 1byte | 1byte | N*1byte | 2byte |
设备地址:钧舵 EPG-HP 系列高精度电动平行夹爪在 Modbus-RTU 通讯网络中的从站地址,其范围为 1-247,此参数可修改。
功能代码:钧舵 EPG-HP 系列高精度电动平行夹爪支持 0x03、0x04、0x06、0x10 等功能码。
数据格式:包括读写数据的寄存器地址、数据长度、数据等。
CRC 校验码:数据帧 CRC 校验码。
第 5 章 调试工具
钧舵EPG-HP 系列高精度电动平行夹爪支持多达 8 组的自定义参数,方便用户切换不同工况,用户可根据现场情况提前调试配置参数,便于快速切换。用户可根据第 6 章所介绍的通讯协议,向电动夹爪发送控制指令修改寄存器参数进行调试,也可以借助本公司提供的调试工具快速调试。为方便不同用户需求,本公司提供相应调试工具:PC 端专用上位机软件。
PC 端专用上位机调试软件为免安装软件,用户可直接打开使用,但所用 PC 机运行环境需满足如下要求:
- Windows 7 或更高版本;
- 主内存至少 50MB;
由于需要用到 USB 转485 模块,因此需要安装相应驱动程序。直流电源和通讯连接线的连接请参考 3.3 电气连接。
完成硬件接线和软件安装后,即可使用 PC 端专用上位机调试软件调试电动夹爪,具体说明如下:
- 打开PC 端专用上位机调试软件
PC 端专用上位机调试软件无需安装,直接双击软件即可打开,其界面如下图 5-1 所示。
图 5-1 PC 端专用上位机软件主界面
- 打开串口通信
调试软件打开时,出现的图 5-1 的界面,选择对应的产品号进入,在本说明中,使用的是
EPG-HP 系列 高精度电动平行夹爪,因此选择 EPG-HP 进入,如图 5-2 所示。
图 5-2 EPG-HP 系列调试软件界面
确定夹爪波特率以及串口号是否正确,避免打开的串口不是与夹爪相连的串口号,可通过图 5-3 进行下拉选择。
图 5-3 打开串口
- 激活电动夹爪
调试软件与电动夹爪连接成功以后,需要主动激活电动夹爪,激活电爪的之前,需要确定电爪的 ID 号,如图 5-4 所示,根据图中所示表面的步骤进行 ID 的读取:
①在特殊功能图中所示 1,可以通过修改图中 2 的位置确定扫描 ID 号的范围,点击图中 3
的位置扫描;
②扫描 ID 结束以后,图中 4 的位置会出现电动夹爪的 ID 站号;
③在 5 的位置输入相同 ID 或者要修改的 ID 号,点击 6 修改 ID
④当图中 7 的位置显示修改 ID 成功,则现在 ID 修改完成。
图 5-4 修改 ID
修改 ID 成功以后,点击调试软件中的使能按钮,按钮变成禁用且电动夹爪出现开合动作手指最终停止运动时,则表明使能成功或初始化成功,特别注意一下,电动夹爪每次断电重启时,都需要进行一遍使能,是为了重置电动夹爪的位置,不然电动夹爪会出现位置报错的情况。
- 调试软件快建命令、自定义参数的使用
为便于快速调试,PC 端专用上位机调试软件提供多种快捷命令供用户使用。用户可通过单击快捷命令操作电爪执行相应动作。钧舵EPG 系列模块化电动夹爪提供多达 8 组自定义参数,用户可根据实际工艺要求,预先设置参数,以适应不同工况要求。如图 5-5 所示,用户输入自定义参数后,点击其后的“写入”按钮,即可将自定义参数下发给电动夹爪,自定义参数设置完成后,用户可通过点击自定义参数命令执行相应操作。
图 5-5 自定义参数与快捷命令
- 状态检测
钧舵 EPG-HP 系列高精度电动平行夹爪支持实时状态反馈,如图 5-6 所示,通过 PC 端专用上位机调试软件可快速查看电动夹爪的运行状态、运动状态曲线图、故障信息等。
图 5-6 状态检测
- 演示模式
为了方便快速的显示夹爪功能,调试软件上提供相关的演示功能,如图 5-7 所示,点击开始即可开始演示,这时上位机软件将通过测试的时间间隔依次循环发送的所选取的数据,所选取的数据有上述提到的快捷命令与自定义参数,通过下拉选择演示下的夹取对应的数即可对应选择的命令取执行,例如选择 1、2 则对应快捷命令的半力半速打开与闭合,其余如图 5-7 所示
图 5-7 演示模式
(7) 特殊功能
其他特殊功能如图 5-8 所示,调试软件支持波特率修改等功能,满足用户的使用需求。
图 5-8 特殊功能演示图
第 6 章 Modbus 协议说明
电动夹爪具有丰富的读写寄存器,根据不同的寄存器可以实现各类功能,其寄存器包含控制用寄存器、状态反馈寄存器、设备寄存器等,控制用寄存器表如下所示:
表 6.1 电动夹爪 Modbus 寄存器
| 0x03E8 低字节 | 控制寄存器 | 0x07D0 低字节 | 夹爪状态 |
| 0x03E8 高字节 | 无参数控制指令寄存器 | 0x07D1 低字节 | 故障状态 |
| 0x03E9 低字节 | 保留 | 0x07D1 高字节 | 位置状态 |
| 0x03E9 高字节 | 位置设置寄存器 | 0x07D2 低字节 | 速度状态 |
| 0x03EA 低字节 | 速度设置寄存器 | 0x07D2 高字节 | 力状态(即时电流) |
| 0x03EA 高字节 | 力设置寄存器 | 0x07D3 低字节 | 母线电压 |
| 0x03EB 低字节 | 预设参数 1 位置设置 | 0x07D3 高字节 | 环境温度 |
| 0x03EB 高字节 | 预设参数 1 速度设置 | ||
| 0x03EC 低字节 | 预设参数 1 力设置 | ||
| 0x03ED 低字节 | 预设参数 2 位置设置 | ||
| 0x03ED 高字节 | 预设参数 2 速度设置 | ||
| 0x03EE 低字节 | 预设参数 2 力设置 | ||
| 0x03EF 低字节 | 预设参数 3 位置设置 | ||
| 0x03EF 高字节 | 预设参数 3 速度设置 | ||
| 0x03F0 低字节 | 预设参数 3 力设置 | ||
| 0x03F1 低字节 | 预设参数 4 位置设置 | ||
| 0x03F1 高字节 | 预设参数 4 速度设置 | ||
| 0x03F2 低字节 | 预设参数 4 力设置 | ||
| 0x03F3 低字节 | 预设参数 5 位置设置 | ||
| 0x03F3 高字节 | 预设参数 5 速度设置 | ||
| 0x03F4 低字节 | 预设参数 5 力设置 |
续表 6.1
| 0x03F5 低字节 | 预设参数 6 位置设置 | ||
| 0x03F5 高字节 | 预设参数 6 速度设置 | ||
| 0x03F6 低字节 | 预设参数 6 力设置 | ||
| 0x03F7 低字节 | 预设参数 7 位置设置 | ||
| 0x03F7 高字节 | 预设参数 7 速度设置 | ||
| 0x03F8 低字节 | 预设参数 7 力设置 | ||
| 0x03F9 低字节 | 预设参数 8 位置设置 | ||
| 0x03F9 高字节 | 预设参数 8 速度设置 | ||
| 0x03FA 低字节 | 预设参数 8 力设置 | ||
| 0x03FB 低字节 | 编码器对零 | ||
| 0x03FC 低字节 | 强行打开制动器 | ||
| 0x03FD 低字节 | 控制模式切换 |
该寄存器是电动夹爪的主要功能寄存器,包含电动夹爪使能,模式切换,动作控制等功能。
表 6.2 控制寄存器说明
| Bit 名称 功能说明 | ||
| 0 | rACT | 在控制电动夹爪前必须先使能电动夹爪。0x0:停止电动夹爪,0x1:使能电动夹爪注意:在执行其他任何操作,rACT 位保持不变。清除 rACT 位以重新启动电动夹爪并清除所有故障状态。使能时请确保滑道内无明显阻碍物导致行程变小 |
| 1 | rMODE | 设置电动平行夹爪的工作模式0x0:处于参数控制模式,需设置当前命令下的位置,速度,力参数。0x1:处于无输入参数控制模式,定参参数参考寄存器0x03E8 高字节。 |
续表 6.2
| 2 | rSTOP:急停 | 0x0:无变化;0x1:停止在当前位置 |
| 3 | rGTO:目标位置 | 控制电动夹爪根据设置的参数进行运动。0x0:停止;0x1:运动到目标位置注意:当不设置该位时,该设备只执行使能指令,不能动作;当 rMODE=0x0 时,参数由设置 0x03E9 高字节和 0x03EA 设置;当 rMODE=0x1 时,参数由 0x03E8高字节对应的参数进行设置。 |
| 4~7 | 预留 | 预留 |
该寄存器是电动夹爪在 rMODE=0x1 时,主站的参数指令。
表 6.3 无参数指令寄存器说明
| Bit | 名称 | 功能说明 | ||||
| 0~7 | 无参数输入控制模式下的参数设置指令。仅在 rMODE=0x1 时 有效 。 另 0x03EB-0x03FA 需要预先设置。参数的格式与 0x03E9 高字 节 和0x03EA一样。 | 功能 | 位置 | 速度 | 力 | |
| 0x0 | Reserve | |||||
| 0x1 | 半力半速打开 | 0x00 | 0x80 | 0x80 | ||
| 0x2 | 半力半速关闭 | 0xFF | 0x80 | 0x80 | ||
| 0x3 | 全力全速打开 | 0x00 | 0xFF | 0xFF | ||
| 0x4 | 全力全速关闭 | 0xFF | 0xFF | 0xFF | ||
| 0x5 | 低力低速打开 | 0x00 | 0x00 | 0x00 | ||
| 0x6 | 低力低速关闭 | 0xFF | 0x00 | 0x00 | ||
| 0x7 | Reserve | |||||
| 0x8 | 电动夹爪参数 1 | 0x03EB 低字节 | 0x03EB 高字节 | 0x03EC 低字节 | ||
| 0x9 | 电动夹爪参数 2 | 0x03ED 低字节 | 0x03ED 高字节 | 0x03EE 低字节 | ||
| 0xA | 电动夹爪参数 3 | 0x03EF 低字节 | 0x03EF 高字节 | 0x03F0 低字节 | ||
| 0xB | 电动夹爪参数 4 | 0x03F1 低字节 | 0x03F1 高字节 | 0x03F2 低字节 | ||
| 0xC | 电动夹爪参数 5 | 0x03F3 低字节 | 0x03F3 高字节 | 0x03F4 低字节 | ||
| 0xD | 电动夹爪参数 6 | 0x03F5 低字节 | 0x03F5 高字节 | 0x03F6 低字节 | ||
| 0xE | 电动夹爪参数 7 | 0x03F7 低字节 | 0x03F7 高字节 | 0x03F8 低字节 | ||
| 0xF | 电动夹爪参数 8 | 0x03F9 低字节 | 0x03F9 高字节 | 0x03FA 低字节 | ||
该寄存器为 rMODE=0x0 时的位置参数设置寄存器
表 6.4 动态位置参数寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | 位置参数寄存器 | 该寄存器用于设置夹持器手指的目标位置。位置 0x00 和 0xFF分别对应于完全开启和完全关闭的机械止损点完全开启:0x00;完全关闭:0xFF注意:1.0×00 表示完全打开,0xFF 表示完全闭合,两指之间线性关系。2. 为了避免夹取状态位置识别错误,需结合电动夹爪的最大行程与夹取物体的最大行程来确定夹取的位置,例如: EPG-HP-26-050 , 这里假设电动夹爪需夹取的物体尺寸为 10mm,EPG-HP26-050 电动夹爪的最大行程为 26mm,我司提供 EPG-HP-26-050 最大位置对应写入值为 255(完全闭合),最小值为 0(完全打开),对应比例关系得出该物体 10mm 对应 EPG-HP-26-050 的夹取位置为 157 即可夹取到物体,但是为了保证电动夹爪夹取物体以后能够正常反馈状态,需要将刚刚好能够夹取到物体的位置设置超过 6(即最大值 255 的 2%)以上,所以将这里的夹取位置设置到 163 以上电动夹爪才能正常反馈状态。 |
该寄存器为 rMODE=0x0 时的速度参数设置寄存器
表 6.5 动态速度参数寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | 速度参数寄存器 | 此寄存器用于实时设置夹持器的关闭或打开速度,然而,设置一个速度不会启动一个动作最低速度:0x00,最高速度:0xFF注意:0x00 代表可以稳定控制的最低速度,0xFF 表示可控的最高速度,他们之间呈线性变化。 |
该寄存器为 rMODE=0x0 时的力参数设置寄存器
表 6.6 动态力参数寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | 力参数寄存器 | 力的设置决定了夹钳的最终握力。这个力量将确定发送到电机的最大电流。最小力:0x00,最大力:0xFF注意:0x00 代表可以稳定控制的最小力,0xFF 表示可控的最大力。 |
该寄存器为 rMODE=0x1 时的位置参数设置寄存器
表 6.7 预设位置参数寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | rPR | 该寄存器用于设置夹持器手指的目标位置。位置 0x00 和 0xFF分别对应于完全开启和完全关闭的机械止损点完全开启:0x00,完全关闭:0xFF注意:无论手指之间如何变化,0x00 总是完全打开,0xFF 为完全闭合,两指之间线性关系。 |
该寄存器为 rMODE=0x1 时的速度参数设置寄存器
表 6.8 预设速度参数寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | rSP | 此寄存器用于实时设置夹持器的关闭或打开速度,然而,设置一个速度不会启动一个动作最低速度:0x00,最高速度:0xFF注意:0x00 代表可以稳定控制的最低速度,0xFF 表示可控的最高速度,他们之间呈线性变化。 |
该寄存器为 rMODE=0x1 时的力矩参数设置寄存器
表 6.9 预设力参数寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | rFC | 力的设置决定了夹钳的最终握力。这个力量将确定发送到电动机的最大电流。如果超过当前限制,手指停止并触发一个目标检测通知。最小力:0x00,最大力:0xFF注意:0x00 代表可以稳定控制的最小力,0xFF 表示可控的最大力。 |
表 6.10 编码器寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | 编码器寄存器 | 此寄存器用于编码器对零设置注意:0x01:代表编码器对零,0x00:正常状态 |
表 6.11 制动器寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | 制动器寄存器 | 此寄存器用于强制打开制动器设置注意:0x01:代表强制打开制动器,0x00:正常状态 |
表 6.12 控制模式切换寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | 模式切换寄存器 | 此寄存器用于控制模式的切换0x55:IO 模式控制其他指令:Modbus-RTU 通讯控制注意:0x55 时,通讯仅可修改寄存器,无法控制电爪运行,仅支持 IO 组合控制电爪运动。 |
该寄存器是电动夹爪的主要功能寄存器,包含电动夹爪使能,模式切换,动作控制等功能。表 6.13 电动夹爪状态寄存器说明
| Bit | 名称 | 功能说明 |
| 0 | gACT | 显示电动夹爪的使能状态,与 rACT 对应0x0:电动夹爪复位中0x1:电动夹爪处于使能状态 |
续表 6.13
| 1 | gDropSta | 显示电动夹爪工件掉落状态0x0:正常0x1:工件掉落 |
| 2 | gMODE | 工作模式0x0:处于参数控制模式0x1:处于无输入参数控制模式 |
| 3 | gGTO | 电动夹爪动作状态0x0:停止(或在执行激活/巡检)0x1:前往目标位置 |
| 4~5 | gSTA | 返回电动夹爪的当前状态和动作0x0:电动夹爪处于复位或者巡检状态,如果已激活,需要查看故障码0x1:正在激活0x2:未使用,保留0x3:激活完成 |
| 6~7 | gOBJ | 目标检测,是一个内置的功能,提供是否抓到物体的状态显示,当 gGTO=0x0 时,该状态无效。 0x0:手指正向指定位置移动。0x1:手指在张开时,由于接触到物体已经停止,表示为内撑模式已撑到物体。0x2:手指在闭合时,由于接触到物体已经停止,表示为外夹模式已夹到物体。0x3:手指已到达指定的位置,但没有检测到对象,或者物体已丢失或未夹住脱落。注意:某些情况可能夹住了但是未能检测到物体,可能是因为被夹持的物体过细,无法有效的侦测到力的变化,因此该情况请忽略该寄存器。 |
例如:返回值为 0xB1 时,将 0xB1 转换为二进制数 10110001
标红部分:代表目标检测,10 转为 16 进制即 0x02,手指在闭合时,由于接触到物体已经停止,表示为外夹模式已夹到物体。
标黄部分:表示电动夹爪的当前状态和动作,11 转为 16 进制即 0x03,代表激活完成
标绿部分:表示电动夹爪动作状态,0 转为 16 进制即 0x00,代表停止(或在执行激活/
巡检)
标蓝部分:表示工作模式,0 转为 16 进制即 0x00,代表处于参数控制模式
标紫部分:表示电动夹爪使能状态,1 转为 16 进制即 0x01,代表电爪处于使能状态
该寄存器是电动夹爪的故障状态寄存器,用以标识不同的故障。
表 6.14 故障寄存器说明
| Bit 名称 功能说明 | ||
| 0 | 电爪激活故障位 | 必须在执行操作之前设置激活位。0x0:正常0x1:电机未激活 |
| 1 | 控制指令故障位 | 控制指令错误0x0:正常0x1:控制指令错误控制指令错误故障时,蓝灯快闪,红灯常灭 |
| 2 | 通讯故障位 | 1 秒内通信丢失0x0:正常0x1:通讯丢失通讯丢失时,蓝灯慢闪,红灯常灭 |
| 3 | 过流故障位 | 电流异常0x0:正常0x1:电流异常出现电流异常时,蓝灯常灭,红灯快闪 |
| 4 | 电压异常故障位 | 电压异常0x0:正常0x1:电压异常,低于 20V 或高于 30V出现电压异常时,蓝灯常灭,红灯慢闪 |
| 5 | 使能故障位 | 使能错误状态0x0:正常0x1:使能故障出现使能故障时,红蓝灯交替闪烁 |
| 6 | 过温故障位 | 过温(内部≥85℃),此时需要冷却至 80℃内) 0x0:正常0x1:过温故障过温故障时,蓝灯常灭,红灯常亮 |
| 7 | 产品自身故障位 | 产品自身故障,请联系钧舵处理0x0:正常0x1:出现产品自身故障出现产品自身故障时,红蓝灯均常亮。 |
该寄存器是电动夹爪的当前位置寄存器。
表 6.15 位置状态寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | gPR | 该寄存器用于显示当前的设定位置,与 rPR 一致。位置 0x00和 0xFF 分别对应于完全开启和完全关闭的机械止损点完全开启:0x00;完全关闭:0xFF注意:无论手指之间如何变化,0 总是全部打开,255 为完全闭合,两指之间准线性关系。 |
该寄存器是电动夹爪的当前速度寄存器。
表 6.16 速度状态寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | gSP | 该寄存器用于显示当前的设定速度。速度 0x00 和 0xFF 分别对应于电爪手指运动的最低速度和最高速度最低速度:0x00;最高速度:0xFF注意:手指运行速度在 0x00 与 0xFF 之间呈线性关系。 |
该寄存器是电动夹爪的当前力状态寄存器。
表 6.17 力状态寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | gCU | 该值为当前电机的电流值,该值为标幺值 |
该寄存器是控制器检测到的母线电压状态寄存器,单位 V。
表 6.18 母线电压寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | gBusVolt | 母线电压占用 1byte,按照无符号 8 位数据解析 |
该寄存器是控制器检测到的环境温度状态寄存器。
表 6.19 环境温度寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | gTemp | 环境温度占用 1byte,按照有符号 8 位数据解析 |
表 6.20 软件版本寄存器说明
| Bit 名称 功能说明 | ||
| 0~7 | 软件版本号 | 软件版本号,子版本号 |
| 8~15 | 软件版本号 | 软件版本号,主版本号 |
设备 ID 为设备在 Modbus 通讯网络中的地址标识,该值可通过 Modbus 通信修改。表 6.21 设备 ID 寄存器说明
| Bit | 名称 | 功能说明 |
| 0~7 | 从站地址 | 设备 ID(1 ~ 247) |
通讯配置参数指的是设备采用 Modbus-RTU 通讯波特率,具体说明如下:
表 6.22 设备通讯配置寄存器说明
| Bit | 名称 | 功能说明 |
| 0:115200 | ||
| 1:57600 | ||
| 2:38400 | ||
| 0~7 | 波特率 | 3:19200 |
| 4:9600 | ||
| 5:4800 | ||
| (默认为 0) |
表 6.23 掉落阈值寄存器说明
| Bit | 名称 | 功能说明 |
| 0~15 | 掉落阈值 | 夹持掉落判断阈值设置,设置范围 0~1000 |
表 6.24 使能状态切换寄存器说明
| Bit | 名称 | 功能说明 |
| 0~15 | 使能状态切换 | 夹持使能状态切换0:使能执行搜索行程1:使能只执行张开2:使能只执行闭合 |
表 6.25 抱闸模式切换寄存器说明
| Bit | 名称 | 功能说明 |
| 0~15 | 抱闸切换 | 抱闸模式切换0:运动生效,制动器在运行过程中实时生效1:掉电保持,制动器只在掉电时生效 |
表 6.26 抱闸功能设置寄存器说明
| Bit | 名称 | 功能说明 |
| 0~15 | 抱闸功能设置 | 抱闸功能设置0:禁用抱闸1:启用抱闸 |
第 7 章 夹持端控制说明与示例
7.1 含参数控制模式及示例
首先对电动夹爪进行初始化,然后和设备联动过程中不断的设置运动参数并检测物体位置,从而实现电动夹爪的有序运动。
7.2 不含参数控制模式及示例
在模式 rMODE=0x1 时,按照 6.2 节中需提前将相应参数写入设备中并固定。第一步:激活请求(清除并设置 rAct=0)
第 8 章 IO 控制说明
本章节主要应对支持 IO 控制的机型进行相应说明。
- DI 输入控制
| 0 | 电动夹爪清除使能,恢复空闲状态 | 电动夹爪清除使能,恢复空闲状态 |
| 1 | 电动夹爪进行使能/执行电动夹爪预 | 执行电动夹爪预设参数 2 |
| 设参数 1 |
注:初次上电或者清除使能状态以后,DI1=1、DI2=0 为夹爪进行使能命令,其余为执行预设参数 1 指令,DI1=0 时,不管 DI2 为 1 还是 0,表示清除使能命令。
- DO 输出反馈
| 0 1 | 电动夹爪夹持检测到工件 | 电动夹爪报错状态 |
| 电动夹爪夹持未检测到工件 | 电动夹爪正常运行中 |
第 9 章 故障处理
钧舵 EPG-HP 系列高精度电动平行夹爪故障诊断便捷高效,用户可以通过 LED 指示灯、故障反馈状态字等方式获取电爪当前状态,快速识别出故障类型。
9.1 故障指示灯
钧舵 EPG-HP 系列电动平行夹爪具有红、蓝两色 LED 灯,通过LED 指示灯状态可显示电爪的运行状态。
表 9.1 指示灯说明
| 序号 LED 指示灯状态 含义 | ||
| 1 | 蓝灯常亮,红灯常灭 | 正常运行 |
| 2 | 蓝灯慢闪(0.5Hz),红灯常灭 | 通讯中断(连续 1s 无数据通讯) |
| 3 | 蓝灯快闪(1Hz),红灯常灭 | 控制指令错误 |
| 4 | 蓝灯常灭,红灯常亮 | 过温故障 |
| 5 | 蓝灯常灭,红灯慢闪(0.5Hz) | 电压异常 |
| 6 | 蓝灯常灭,红灯快闪(1Hz) | 过流故障 |
| 7 | 红蓝灯交替闪烁 | 使能故障 |
| 8 | 红蓝灯均常亮(粉色) | 产品自身故障 |
除了通过 LED 指示灯状态获取电爪运行状态外,用户可以通过读取故障寄存器(6.3.2 故障寄存器),从故障寄存器状态字中解析出当前电爪运动状态。
9.2 故障处理
故障现象
故障状态字的 bit2 = 0x01,同时故障指示灯状态为:蓝灯慢闪(0.5Hz),红灯常灭。可能原因及处理措施
表 9.2 通讯中断故障说明
| 可能原因 | 检测方法 | 处理措施 | 备注 |
| 通讯线路异常 | 通讯线是否存在接触不良RS485A、RS485B是否接反 | 紧固通讯线路调整 RS485A 和RS485B 的线序 |
续表 9.2
故障现象
故障状态字的 bit1 = 0x01,同时故障指示灯状态为:蓝灯快闪(1Hz),红灯常灭。可能原因及处理措施
表 9.3 控制指令故障说明
| 可能原因 | 检测方法 | 处理措施 | 备注 |
| 外围设备发送的控制指令存在错误 | 检查所发送控制指令是否存在错误,可参考第六章的内容发送正确指令。 | 发送正确控制指令 |
故障现象
故障状态字的 bit6 = 0x01,同时故障指示灯状态为:蓝灯常灭,红灯常亮。可能原因及处理措施
表 9.4 过温故障说明
| 可能原因 | 检测方法 | 处理措施 | 备注 |
| 外部环境温度过高,或环境密闭,发热设备布局过密 | 检测环境温度是否高于45℃排查发热设备及其布局 | 增加环境散热设备合理布局发热设备 |
故障现象
故障状态字的 bit4 = 0x01,同时故障指示灯状态为:蓝灯常灭,红灯慢闪(0.5Hz)。
可能原因及处理措施
表 9.5 电压异常说明
| 可能原因 | 检测方法 | 处理措施 | 备注 |
| 母线电压低于20V | 检测输入电动夹爪的DC 电压是否低于 20V | 提高开关电源输出电压,使输入电动夹爪的母线电压在 24V±10%范围内 | |
| 母线电压高于30V | 检测输入电动夹爪的DC 电压是否高于 30V | 降低开关电源输出电压,使输入电动夹爪的母线电压在 24V±10%范围内 |
故障现象
故障状态字的 bit3 = 0x01,同时故障指示灯状态为:蓝灯常灭,红灯快闪(1Hz)。可能原因及处理措施
表 9.6 过流故障说明
| 可能原因 | 检测方法 | 处理措施 | 备注 |
| 短路 | 检查是否存在短路 | 将短路的地方处理 | |
| 限流值低 | 打开上位机软件,检查设定值是否太低 | 提高过流限定值 |
故障现象
故障状态字的 bit5 = 0x01,同时故障指示灯状态为:红蓝灯交替闪烁。可能原因及处理措施
表 9.7 夹持端使能故障说明
| 可能原因 | 检测方法 | 处理措施 | 备注 |
| 上电后,使能时滑道有异物 | 检查滑道是否有异物 | 清除异物后,重新发送使能命令 |
故障状态字 bit7=0x01,若出现产品自身故障,请联系钧舵官方售后人员或相关代理商处理。
第 10 章 维护与质保
10.1 质保说明
我司对EPG-HP 系列高精度电动平行夹爪质保期为一年,质保期从收到产品开始计算。在质保期内,本公司将对不良产品进行免费维护或更换,不良包括但不限于以下几种情况:
- 电动夹爪不能张开或闭合。
- 电动夹爪的软件无法连接。
- 电动夹爪异常抖动。
10.2 警告
如发生以下情况,则产品保修失效:
①该单元已被未经授权的个人篡改、修理或破坏,保修标签已被移除;
②除本说明书中所述特殊状况外,设备螺钉被卸下,设备被打开;
③设备序列号已被更改、擦除或删除,设备单元被误用、忽略或意外损坏。
在上述情况下,本公司均不对特殊、偶然或间接损失负责。本公司对因使用产品引起的损坏不承担任何责任,也不对与产品连接的其他项目的性能故障,或产品可能属于其中的任何系统上的运行问题负责。以上保证代替所有其他明示、暗示或者法定的保证,包括但不限于针对特定目的的时效性和适用性的暗示保证。
其他声明:
本公司保留随时更改经营范围内任何产品的设计或结构的权利,但没有义务对已购买的设备进行任何更改。本保修不包括由于以下原因导致的故障:不当使用或安装、正常磨损、事故问题、人为失误、不可避免的灾难等自然事故,或其他超出产品使用和控制范围发生的问题。