In the era of rapid advancement in robotics, enabling machines to perceive and interact with the physical world as deftly as humans remains a ultimate dream for researchers and engineers. One of the greatest challenges in realizing this dream is replicating the unparalleled dexterity, adaptability, and strength of the human hand. Whether it’s precision assembly on industrial production lines, unstructured bin picking in logistics warehouses, attentive service in home environments, or restoring lost function for individuals with limb differences, a highly anthropomorphic “hand” is an indispensable core component.
It is in this context that the Humanoid Five-Finger Dexterous Hand RH56DFX Series emerges. It is not merely a simple gripper or end-effector, but a complex system integrating advanced actuation technology, precision sensing, and intelligent control. With its exceptional grip strength, anthropomorphic movement, robust environmental adaptability, and native ROS (Robot Operating System) support, it is becoming a powerful engine driving scientific innovation and industrial upgrading.


I. Core Advantages & Features of the RH56DFX Series
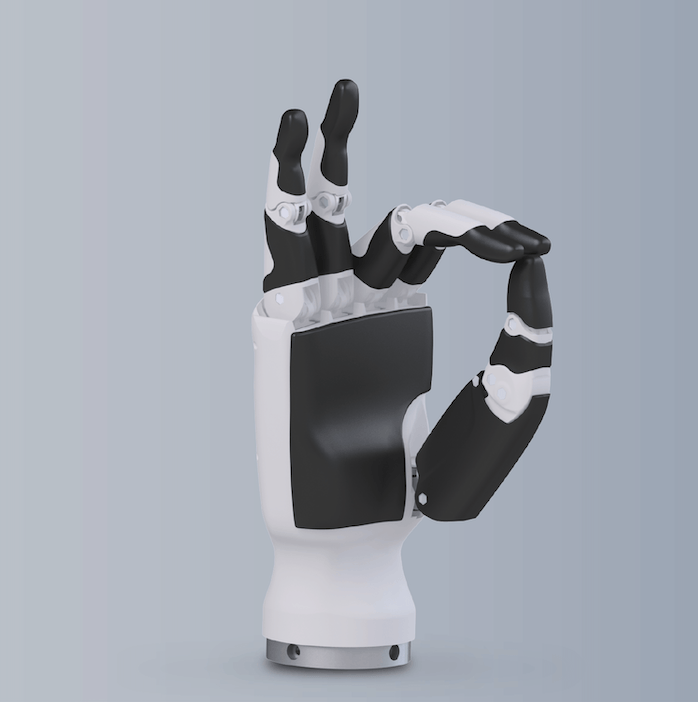
1. Anthropomorphic Five-Finger Design for Ultimate Dexterity
The RH56DFX Series strictly follows the anatomical structure of the human hand, featuring five independently moving fingers (with an opposable thumb), providing a total of 15 Degrees of Freedom (DoF). This design allows it to replicate over 90% of common human grasping and manipulation gestures, from precise fingertip pinching (e.g., picking up a needle or a card), powerful power grasping (e.g., holding a hammer or water bottle), to precise lateral pinching (e.g., holding a key) and enveloping grasp (e.g., grasping a ball). This flexibility enables it to handle highly complex and variable task environments.
2. Superior Grasping Force, Balancing Power and Delicacy
Unlike traditional dexterous hands that often sacrifice strength for flexibility, the RH56DFX Series innovatively employs high-performance micro actuator modules and an optimized tendon-driven transmission system. This allows for a maximum fingertip force of up to 10N, with whole-hand grasp force far exceeding that of similar products. This means it can not only gently pick up an egg without damaging it but also firmly grasp heavy tools (like a wrench or power drill) or irregularly shaped items (like wine bottles or food containers), truly achieving the perfect combination of “raw power” and “fine craftsmanship”.
3. Integrated High-Precision Joint Torque Sensors for Tactile Perception
Each finger joint is equipped with a high-precision joint torque sensor. This is one of the core technologies that distinguishes the RH56DFX Series from many other dexterous hands. The sensors provide real-time feedback on the forces and torques experienced by the fingers during grasping, providing crucial haptic information to the control system. Based on this data, the dexterous hand can achieve:
- Adaptive Grasping: Automatically adjust grip force to adapt to object material (rigid, soft) and fragility (egg, glass) without complex pre-programming.
- Force-Controlled Manipulation: Execute tasks requiring fine force feedback, such as insertion, assembly, and screw driving.
- Slip Detection: Sense object slippage in real-time and adjust grip force promptly to prevent dropping.
- Collision Detection: Enhance safety in human-robot collaboration.
4. Native ROS Support & Open-Source Ecosystem, Simplifying Development
The RH56DFX Series is built for modern robotics research and application, offering fully open-source ROS drivers and功能包. Developers can easily communicate with the hand via ROS topics, services, or action interfaces, control each joint, and obtain all sensor data in real-time (joint angles, torque, temperature, etc.). We provide extensive sample code and documentation, including:
- Gazebo Simulation Model: Allows users to develop and test grasping algorithms in a simulation environment first, significantly reducing development costs and risks.
- SLAM Algorithm Integration Examples: Demonstrate how to integrate with mobile bases and vision sensors to complete autonomous grasping tasks.
- AI Grasping Demos: Combine deep learning vision models to achieve intelligent “hand-eye” coordinated grasping.
This openness and ease of integration greatly accelerate the process from prototyping to actual deployment.
5. Modular and Maintainable Design
The fingers feature a modular design, allowing for the disassembly and replacement of a single finger within minutes, drastically reducing maintenance costs and downtime. The compact layout of the drive units and neat cable management ensure high reliability.
II. Detailed Technical Specifications
| Parameter | Specification |
|---|---|
| Degrees of Freedom (DoF) | 15 DoF (Thumb: 4, Index: 3, Middle: 3, Ring: 3, Pinky: 2) |
| Actuation Method | High-performance BLDC servo motors + Tendon drive (仿肌腱) |
| Fingertip Force | Max 10N (Continuous operational force ≥5N) |
| Single Finger Speed | ≥90° /second (under load) |
| Sensors | High-precision torque sensor in each joint, motor encoder, temperature sensor |
| Communication Interface | Ethernet (TCP/IP), RS485 (standard) |
| Supported Protocols | ROS (standard msg formats), Modbus-RTU, custom binary protocol |
| Power Supply | 24V DC |
| Power Consumption | Idle: ~15W, Operating: ~60W, Peak: ~150W |
| Weight | ≈1.5 kg (excluding cables) |
| Materials | Aerospace-grade aluminum alloy skeleton, high-performance engineering plastic shell, special wear-resistant tendons |
| Software Support | ROS (Noetic, Humble, Foxy), provided low-level SDK (C++/Python) |
| Supported Tools | Gazebo/URDF models, RVIZ configuration tool, visual calibration and debugging software |
III. Application Scenarios
1. Cutting-Edge Scientific Research & Education
- Robotics: An ideal validation platform for algorithms in reinforcement learning, imitation learning, grasp planning, and force control.
- Artificial Intelligence: For developing embodied AI systems with “hand-eye-brain” coordination.
- Cognitive Science: Studying the mechanisms of human grasping strategies and tactile perception.
- Higher Education: Provides top-tier teaching and experimental equipment for students in automation, mechanical engineering, and AI.
2. Industrial Automation & Logistics
- Unstructured Bin Picking: Grasping packages and goods of varying shapes, sizes, and materials in logistics warehouses.
- Flexible Assembly: Performing insertion, fastening, and assembly of precision components on production lines for electronics, automotive parts, etc.
- Quality Inspection: Detecting surface defects or assembly quality through force-controlled touch.
3. Service & Specialized Robots
- Home Service: Enabling robots to perform tasks like serving drinks, tidying objects, and opening doors.
- Medical Rehabilitation: Assisting patients with eating or fetching medicine as part of a care robot system.
- Hazardous Operations: Replacing humans in performing tasks in dangerous environments like nuclear radiation or chemical plants.
4. Advanced Intelligent Prosthetics
The highly biomimetic nature and force feedback capability of the RH56DFX Series make it a technological foundation for next-generation intelligent bionic prosthetics. Combined with EMG signal control, it can restore extremely natural and practical hand function for upper-limb amputees, significantly improving their quality of life.
IV. Why Choose the RH56DFX Series?
- Perfect Balance of Performance and Price: While offering top-tier performance, we have controlled costs through optimized design and supply chain management, making it a wise choice for both research and commercial applications.
- Powerful Technical Support & Community: We have a professional engineering team providing technical support and actively build a user community for sharing use cases and experiences, fostering collective technological progress.
- Continuous Iteration & Updates: Our ROS drivers and firmware are continuously updated, adding new features and optimizing performance to protect your investment.
V. Get More Information
If you are interested in the RH56DFX Series Humanoid Five-Finger Dexterous Hand, please contact our sales and technical team. We can provide you with detailed technical documentation, quotations, and discuss customized solutions based on your specific needs.
Act now! Equip your robotics project with the “soulful hands” of the RH56DFX Series and unlock infinite possibilities!
| Parameter | Specification |
|---|---|
| Degrees of Freedom (DoF) | 15 DoF (Thumb: 4, Index: 3, Middle: 3, Ring: 3, Pinky: 2) |
| Actuation Method | High-performance BLDC servo motors + Tendon drive (仿肌腱) |
| Fingertip Force | Max 10N (Continuous operational force ≥5N) |
| Single Finger Speed | ≥90° /second (under load) |
| Sensors | High-precision torque sensor in each joint, motor encoder, temperature sensor |
| Communication Interface | Ethernet (TCP/IP), RS485 (standard) |
| Supported Protocols | ROS (standard msg formats), Modbus-RTU, custom binary protocol |
| Power Supply | 24V DC |
| Power Consumption | Idle: ~15W, Operating: ~60W, Peak: ~150W |
| Weight | ≈1.5 kg (excluding cables) |
| Materials | Aerospace-grade aluminum alloy skeleton, high-performance engineering plastic shell, special wear-resistant tendons |
| Software Support | ROS (Noetic, Humble, Foxy), provided low-level SDK (C++/Python) |
| Supported Tools | Gazebo/URDF models, RVIZ configuration tool, visual calibration and debugging software |
…
…