协作机器人具备碰撞检测、拖动示教、高扩展能力等功能。当机器人碰到外部设施(受到外力)时,可迅速检测到并使机器人停止运动,增强机器人的安全性。与传统工业机器人对比,具备安全、便捷等优势,体型紧凑,符合人体工程学原理,能实现灵活的调度且易于整合至现有的生产线中。在协作区域内可直接与人进行交互,使生产柔性得以最大化,满足更多用户的需求。

华数机器人 CR 系列工业协作机器人 兼具 传统工业机器人 与 协作机器人(Cobot) 的优势,在保证 高速、高精度、稳定性和可靠性 的同时,实现了协作机器人所需的 安全性与便利性,是新一代智能制造的理想选择。
核心功能与特点
- 碰撞检测与安全防护
- 采用先进的力觉感知技术,能够快速检测与外部设备或人员的非预期碰撞。
- 一旦检测到异常外力,机器人会立即停止动作,确保操作人员安全并减少设备损伤风险。
- 高防护等级
- 具备出色的环境适应性,可从容应对粉尘、潮湿、温差等复杂工业环境。
- 保证机器人在恶劣条件下依然保持稳定可靠的运行表现。
- 双速模式(高速/低速)
- 支持在 高速精密作业模式 与 低速安全协作模式 之间灵活切换。
- 高速模式适合批量化、重复性强的工业工序,低速模式适合人机协同的生产环节。
- 强扩展能力
- 模块化设计,便于与各类外围设备、传感器、视觉系统及末端执行器集成。
- 灵活应用于 3C电子、汽车制造、金属加工、食品、物流、医疗 等多个行业。
相较于传统机器人和协作机器人
- 与传统工业机器人相比:
CR 系列在保持高速与高精度的同时,增加了人机协作的安全功能。 - 与常规协作机器人相比:
CR 系列在速度、精度、稳定性和可靠性方面全面提升,更接近传统工业机器人的性能水准。
典型应用场景
- 装配与搬运:3C电子、家电、消费品
- 焊接与加工:汽车、五金制造
- 包装与码垛:食品、物流行业
- 检测与测试:医疗、半导体
CR 系列工业协作机器人 为企业提供 灵活、安全且高性能 的智能自动化解决方案,是实现工业 4.0 与智能工厂建设的重要助力。
华数机器人 CR 系列工业协作机器人 兼具 传统工业机器人 与 协作机器人(Cobot) 的优势,在保证 高速、高精度、稳定性和可靠性 的同时,实现了协作机器人所需的 安全性与便利性,是新一代智能制造的理想选择。
核心功能与特点
- 碰撞检测与安全防护
- 采用先进的力觉感知技术,能够快速检测与外部设备或人员的非预期碰撞。
- 一旦检测到异常外力,机器人会立即停止动作,确保操作人员安全并减少设备损伤风险。
- 高防护等级
- 具备出色的环境适应性,可从容应对粉尘、潮湿、温差等复杂工业环境。
- 保证机器人在恶劣条件下依然保持稳定可靠的运行表现。
- 双速模式(高速/低速)
- 支持在 高速精密作业模式 与 低速安全协作模式 之间灵活切换。
- 高速模式适合批量化、重复性强的工业工序,低速模式适合人机协同的生产环节。
- 强扩展能力
- 模块化设计,便于与各类外围设备、传感器、视觉系统及末端执行器集成。
- 灵活应用于 3C电子、汽车制造、金属加工、食品、物流、医疗 等多个行业。
相较于传统机器人和协作机器人
- 与传统工业机器人相比:
CR 系列在保持高速与高精度的同时,增加了人机协作的安全功能。 - 与常规协作机器人相比:
CR 系列在速度、精度、稳定性和可靠性方面全面提升,更接近传统工业机器人的性能水准。
典型应用场景
- 装配与搬运:3C电子、家电、消费品
- 焊接与加工:汽车、五金制造
- 包装与码垛:食品、物流行业
- 检测与测试:医疗、半导体
CR 系列工业协作机器人 为企业提供 灵活、安全且高性能 的智能自动化解决方案,是实现工业 4.0 与智能工厂建设的重要助力。
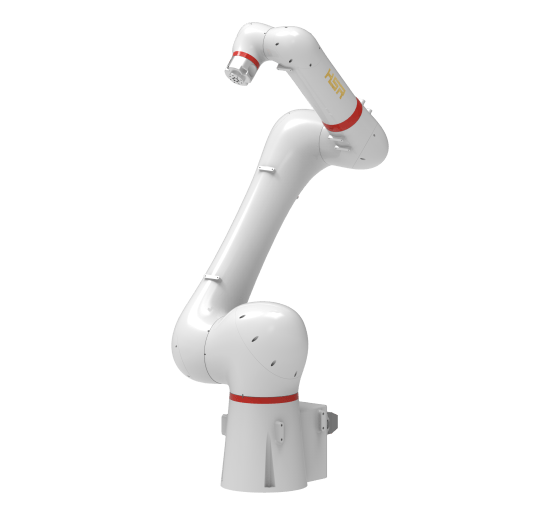
HSR-CR605-790工业协作机器人具备以下功能:碰撞检测、拖动示教、高精度、高刚性、高防护等特性。与传统工业机器人、协作机器人对比,既具备工业机器人的高速、高精、高刚性特性,也具备协作机器人的安全可靠、操作简便等特性。机器人防护等级IP67,可应对不同应用场景。适用于装配、上下料、涂胶、焊接、螺丝锁附等应用场景。
| 工业机器人 | HSR-CR605-790 | |
|---|---|---|
| 自由度 | 6 | |
| 额定负载 | 5kg | |
| 最大工作半径 | 785mm | |
| 重复定位精度 | ±0.02mm | |
| 运动范围 | J1 | ±360° |
| J2 | -240°/+60° | |
| J3 | -60° /+240° | |
| J4 | ±360° | |
| J5 | ±360° | |
| J6 | ±360° | |
| 最高速度 | J1 | 200°/s,3.49rad/s |
| J2 | 200°/s,3.49rad/s | |
| J3 | 300°/s,5.23rad/s | |
| J4 | 300°/s,5.23rad/s | |
| J5 | 300°/s / 5.23rad/s | |
| J6 | 375°/s,6.54rad/s | |
| 容许惯性矩 | J6 | 0.15kg·m² |
| J5 | 0.58kg·m² | |
| J4 | 0.31kg·m² | |
| 容许扭矩 | J6 | 10Nm |
| J5 | 16.5Nm | |
| J4 | 11Nm | |
| 适用环境 | 温度 | 0~45° |
| 湿度 | 20%~80% | |
| 其他 | 避免与易燃易爆或腐蚀性气体、液体接触,远离电子噪声源(等离子) | |
| 示教器线缆长度 | 8m | |
| 本体-柜体连接线长度 | 3m | |
| I/O参数 | 数字量:16位输入,16位输出 | |
| 本体预留信号线 | 8位 | |
| 预留气路 | 1xΦ6 | |
| 电源容量 | 1.3kVA | |
| 额定功率/电压/电流 | 1.1kW/单相AC220V/5A | |
| 本体/电柜防护等级 | IP67/IP20 | |
| 安装方式 | 地面、侧面、倒挂安装 | |
| 本体/电柜重量 | 24kg/15kg | |
HSR-CR607-890工业协作机器人具备以下功能:碰撞检测、拖动示教、高精度、高刚性、高防护等特性。与传统工业机器人、协作机器人对比,既具备工业机器人的高速、高精、高刚性特性,也具备协作机器人的安全可靠、操作简便等特性。机器人防护等级IP67,可应对不同应用场景。适用于装配、上下料、 涂胶、焊接、螺丝锁附等应用场景。
| 工业机器人 | HSR-CR607-890 | |
| 自由度 | 6 | |
| 额定负载 | 7kg | |
| 最大工作半径 | 885mm | |
| 重复定位精度 | ±0.02mm | |
| 运动范围 | J1 | ±360° |
| J2 | -240°/+60° | |
| J3 | -60° /+240° | |
| J4 | ±360° | |
| J5 | ±360° | |
| J6 | ±360° | |
| 最高速度 | J1 | 240°/s,4.18rad/s |
| J2 | 210°/s,3.66rad/s | |
| J3 | 270°/s,4.71rad/s | |
| J4 | 375°/s,6.54rad/s | |
| J5 | 300°/s,5.23rad/s | |
| J6 | 600°/s,10.5rad/s | |
| 容许惯性矩 | J6 | 0.37kg·m² |
| J5 | 0.54kg·m² | |
| J4 | 2.08kg·m² | |
| 容许扭矩 | J6 | 11.8Nm |
| J5 | 18.9Nm | |
| J4 | 37.8Nm | |
| 适用环境 | 温度 | 0~45° |
| 湿度 | 20%~80% | |
| 其他 | 避免与易燃易爆或腐蚀性气体、液体接触,远离电子噪声源(等离子) | |
| 示教器线缆长度 | 8m | |
| 本体-柜体连接线长度 | 3m | |
| I/O参数 | 数字量:16位输入,16位输出 | |
| 本体预留信号线 | 8位 | |
| 预留气路 | 1xΦ6 | |
| 电源容量 | 1.3kVA | |
| 额定功率/电压/电流 | 1.95KW/单相AC220V/9.3A | |
| 本体/电柜防护等级 | IP67/IP20 | |
| 安装方式 | 地面、侧面、倒挂安装 | |
| 本体/电柜重量 | 35kg/15kg | |
HSR-CR612-1500工业协作机器人具备以下功能:碰撞检测、拖动示教、高精度、高刚性、 高防护等特性。与传统工业机器人、协作机器人对比,既具备工业机器人的高速、高精、高刚性特性,也具备协作机器人的安全可靠、操作简便等特性。机器人防护等级IP67,可应对不同应用场景。适用于装配、上下料、涂胶、焊接、螺丝锁附等应用场景。
| 工业机器人 | HSR-CR612-1500 | |
| 自由度 | 6 | |
| 额定负载 | 12kg | |
| 最大工作半径 | 1455mm | |
| 重复定位精度 | ±0.03mm | |
| 运动范围 | J1 | ±360° |
| J2 | ±360° | |
| J3 | -75° /+255° | |
| J4 | ±360° | |
| J5 | ±360° | |
| J6 | ±360° | |
| 最高速度 | J1 | 240°/s,4.18rad/s |
| J2 | 250°/s,4.36rad/s | |
| J3 | 240°/s,4.18rad/s | |
| J4 | 480°/s,8.38rad/s | |
| J5 | 360°/s,6.28rad/s | |
| J6 | 720°/s,12.56rad/s | |
| 容许惯性矩 | J6 | 0.45kg·m² |
| J5 | 1.04kg·m² | |
| J4 | 0.59kg·m² | |
| 容许扭矩 | J6 | 15Nm |
| J5 | 31Nm | |
| J4 | 23Nm | |
| 适用环境 | 温度 | 0~50°C |
| 湿度 | 20%~80% | |
| 其他 | 避免与易燃易爆或腐蚀性气体、液体接触,远离电子噪声源(等离子) | |
| 示教器线缆长度 | 8m | |
| 本体-柜体连接线长度 | 3m | |
| I/O参数 | 数字量:31位输入,31位输出 | |
| 本体预留信号线 | 12位 | |
| 预留气路 | 1xΦ6 | |
| 电源容量 | 2.8kVA | |
| 额定功率/电压/电流 | 2.23kW/单相AC220V/12.1A | |
| 本体/电柜防护等级 | IP67/IP20 | |
| 安装方式 | 地面、倒挂安装 | |
| 本体/电柜重量 | 55kg/15kg | |
HSR-CR616-1200工业协作机器人具备以下功能:碰撞检测、拖动示教、高精度、高刚性、 高防护等特性。与传统工业机器人、协作机器人对比,既具备工业机器人的高速、高精、高刚性特性,也具备协作机器人的安全可靠、操作简便等特性。机器人防护等级IP67,可应对不同应用场景。适用于装配、上下料、涂胶、焊接、螺丝锁附等应用场景。
| 工业机器人 | HSR-CR616-1200 | |
| 自由度 | 6 | |
| 额定负载 | 16kg | |
| 最大工作半径 | 1155mm | |
| 重复定位精度 | ±0.03mm | |
| 运动范围 | J1 | ±360° |
| J2 | ±360° | |
| J3 | ﹣70°/+250° | |
| J4 | ±360° | |
| J5 | ±360° | |
| J6 | ±360° | |
| 最高速度 | J1 | 240°/s,4.18rad/s |
| J2 | 250°/s,4.36rad/s | |
| J3 | 210°/S,3.66rad/s | |
| J4 | 450°/s,7.85 rad/s | |
| J5 | 360°/s,6.28rad/s | |
| J6 | 450°/s,7.85 rad/s | |
| 容许惯性矩 | J6 | 0.45kg·m² |
| J5 | 0.92kg·m² | |
| J4 | 1.43kg·m² | |
| 容许扭矩 | J6 | 19.2Nm |
| J5 | 37.92Nm | |
| J4 | 46.4Nm | |
| 适用环境 | 温度 | 0~50°C |
| 湿度 | 20%~80% | |
| 其他 | 避免与易燃易爆或腐蚀性气体、液体接触,远离电子噪声源(等离子) | |
| 示教器线缆长度 | 8m | |
| 本体-柜体连接线长度 | 3m | |
| I/O参数 | 数字量:31位输入,31位输出 | |
| 本体预留信号线 | 12位 | |
| 预留气路 | 1xΦ6 | |
| 电源容量 | 2.8kVA | |
| 额定功率/电压/电流 | 2.23kW/单相AC220V/12.1A | |
| 本体/电柜防护等级 | IP67/IP20 | |
| 安装方式 | 地面、倒挂安装 | |
| 本体/电柜重量 | 53.4kg/15kg | |
HSR-CR625-2000工业协作机器人具备以下功能:碰撞检测、拖动示教、高精度、高刚性、高防护等特性。与传统工业机器人、协作机器人对比,既具备工业机器人的高速、高精、高刚性特性,也具备协作机器人的安全可靠、操作简便等特性。可应对不同应用场景。适用于装配、上下料、涂胶、焊接、螺丝锁附等应用场景。
| 工业机器人 | HSR-CR625-2000 | |
|---|---|---|
| 自由度 | 6 | |
| 额定负载 | 25kg | |
| 最大工作半径 | 2000mm | |
| 重复定位精度 | ±0.05mm | |
| 运动范围 | J1 | ±360° |
| J2 | ±360° | |
| J3 | ﹣70°/+250° | |
| J4 | ±360° | |
| J5 | ±360° | |
| J6 | ±360° | |
| 最高速度 | J1 | 187°/s,3.26rad/s |
| J2 | 160°/S / 2.79rad/s | |
| J3 | 200°/s,3.48rad/s | |
| J4 | 260°/s,4.53rad/s | |
| J5 | 300°/s,5.23rad/s | |
| J6 | 360°/s,6.28 rad/s | |
| 容许惯性矩 | J6 | 1.52kg·m² |
| J5 | 2.7kg·m² | |
| J4 | 1.15kg·m² | |
| 容许扭矩 | J6 | 58Nm |
| J5 | 125Nm | |
| J4 | 140Nm | |
| 适用环境 | 温度 | 0~45° |
| 湿度 | 20%~80% | |
| 其他 | 避免与易燃易爆或腐蚀性气体、液体接触,远离电子噪声源(等离子) | |
| 示教器线缆长度 | 8m | |
| 本体-柜体连接线长度 | 6m | |
| I/O参数 | 数字量:30位输入,30位输出 | |
| 本体预留信号线 | 24位 | |
| 预留气路 | 2xΦ8 | |
| 电源容量 | 6.5kVA | |
| 额定功率/电压/电流 | 6.2kW/三相380V/10A | |
| 本体/电柜防护等级 | IP67/IP54 | |
| 安装方式 | 地面、倒挂、侧面安装 | |
| 本体/电柜重量 | 150kg/28kg | |
HSR-CR630-1750工业协作机器人具备以下功能:碰撞检测、拖动示教、高精度、高刚性、高防护等特性。与传统工业机器人、协作机器人对比,既具备工业机器人的高速、高精、高刚性特性,也具备协作机器人的安全可靠、操作简便等特性。可应对不同应用场景。适用于装配、上下料、涂胶、焊接、螺丝锁附等应用场景。
| 工业机器人 | HSR-CR630-1750 | |
| 自由度 | 6 | |
| 额定负载 | 30kg | |
| 最大工作半径 | 1750mm | |
| 重复定位精度 | ±0.05mm | |
| 运动范围 | J1 | ±360° |
| J2 | ±360° | |
| J3 | ±360° | |
| J4 | ±360° | |
| J5 | ±360° | |
| J6 | ±360° | |
| 最高速度 | J1 | 187°/s,3.26rad/s |
| J2 | 160°/s, 2.79rad/s | |
| J3 | 180°/s,3.14rad/s | |
| J4 | 260°/s,4.53rad/s | |
| J5 | 230°/s,4.01rad/s | |
| J6 | 360°/s,6.28 rad/s | |
| 容许惯性矩 | J6 | 1.52kg·m² |
| J5 | 2.7kg·m² | |
| J4 | 1.15kg·m² | |
| 容许扭矩 | J6 | 58Nm |
| J5 | 125Nm | |
| J4 | 140Nm | |
| 适用环境 | 温度 | 0~45° |
| 湿度 | 20%~80% | |
| 其他 | 避免与易燃易爆或腐蚀性气体、液体接触,远离电子噪声源(等离子) | |
| 示教器线缆长度 | 8m | |
| 本体-柜体连接线长度 | 6m | |
| I/O参数 | 数字量:30位输入,30位输出 | |
| 本体预留信号线 | 24位 | |
| 预留气路 | 2xΦ8 | |
| 电源容量 | 6.5kVA | |
| 额定功率/电压/电流 | 6.2kW/三相380V/10A | |
| 本体/电柜防护等级 | IP67/IP54 | |
| 安装方式 | 地面、倒挂、侧面安装 | |
| 本体/电柜重量 | 145kg/28kg | |
…

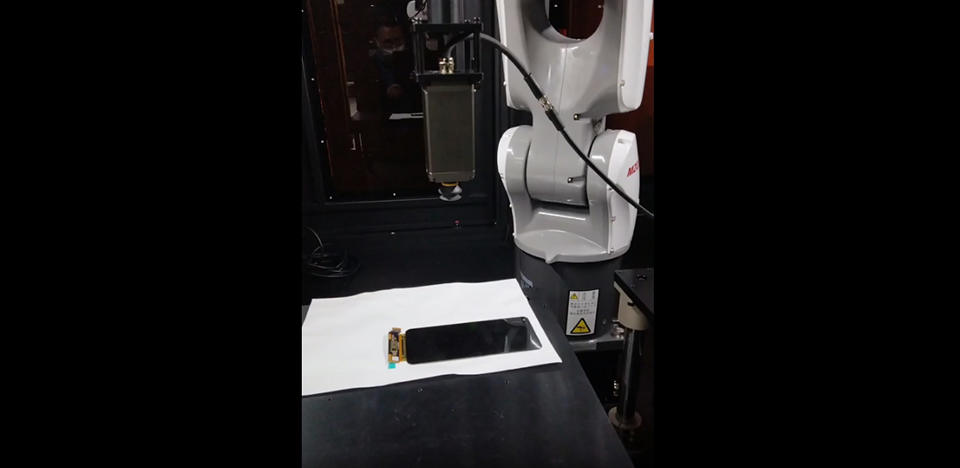
钧舵电动真空执行器EVS01在断路器装配中的创新应用与行业价值
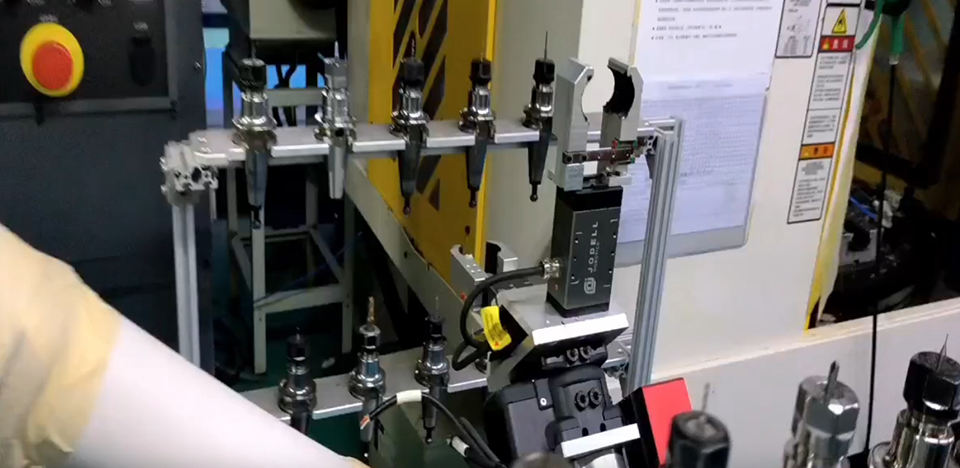
钧舵平行电动夹爪EPG40-100在CNC上下料换刀中的创新应用与行业价值