CO协作机器人相对于传统的工业机器人,具备安全、便捷等优势,体型紧凑,符合人体工程学原理,能实现灵活的调度且易于整合至现有的生产线中。在协作区域内可直接与人进行交互,使生产柔性得以最大化,满足更多用户的需求,通过机器人技术增强生产劳动力水平,降低成本,提高竞争力。

华数机器人 CO 系列协作机器人 相较于传统工业机器人,具备 安全性与便利性 的突出优势,同时在 体积设计、人体工学、柔性调度与易集成性 方面表现卓越,能够轻松适配多样化的生产环境。其设计理念以 “人机协同、柔性制造” 为核心,帮助企业提升生产效率、降低人力成本并增强竞争力。
核心功能与特点
- 安全与便利
- 支持直接在人机协作区域中工作,内置碰撞检测与安全控制机制。
- 操作简单直观,适合非专业人员快速上手使用。
- 紧凑设计与人体工学
- 采用轻量化、紧凑型结构设计,占地空间小,适合在有限的工作环境中部署。
- 符合人体工学原理,提升操作舒适性和长期使用的便捷性。
- 柔性调度与高适配性
- 可快速在不同工位和任务间切换,实现柔性生产。
- 支持与多种生产设备、传感器和执行工具无缝集成,易于部署到现有产线中。
- 最大化生产灵活性
- 允许人与机器人直接交互,大幅提高生产灵活性和定制化能力。
- 满足更多行业和用户对智能制造的需求。
应用价值
- 提升生产力:通过自动化与人机协作减少重复性和高强度劳动。
- 降低成本:在提高效率的同时减少人工投入和安全风险。
- 增强竞争力:帮助企业快速响应市场变化,满足柔性制造需求。
典型应用场景
- 3C电子与精密装配:适用于对精度与灵活性要求高的生产工序。
- 食品与医疗行业:满足安全卫生标准,同时保证柔性操作。
- 物流与分拣:支持快速部署,实现小批量、多批次的柔性处理。
- 教育与科研:作为实验与教学平台,推动人机协作技术应用。
华数机器人 CO 系列协作机器人 以安全、紧凑、灵活和易用为核心优势,助力企业构建智能工厂、实现工业 4.0 的柔性制造升级。
新一代协作机器人HSR-CO605-1000,具备安全、高效、易于上手等优点,体型紧凑,符合人体工程学原理,能实现灵活的调度且易于整合至现有的生产线中。在协作区域内可直接与 人进行交互,使生产柔性得以最大化,满足更多用户的需求,通过机器人技术增强生产劳动力水平,降低成本,提高竞争力。
| 工业机器人 | HSR-CO605-1000 | |
| 自由度 | 6 | |
| 额定负载 | 5Kg | |
| 最大工作半径 | 1005mm | |
| 重复定位精度 | ±0.02mm | |
| 运动范围 | J1 | ±180° |
| J2 | -220°/+40° | |
| J3 | -55° /+235° | |
| J4 | ±180° | |
| J5 | ±130° | |
| J6 | ±180° | |
| 最高速度 | J1 | 120°/s,2.09rad/s |
| J2 | 120°/s,2.09rad/s | |
| J3 | 150°/s,2.62rad/s | |
| J4 | 240°/s,4.19rad/s | |
| J5 | 240°/s,4.19rad/s | |
| J6 | 240°/s,4.19rad/s | |
| 容许惯性矩 | J6 | 0.41kg㎡ |
| J5 | 0.30kg㎡ | |
| J4 | 0.30kg㎡ | |
| 容许扭矩 | J6 | 13.75Nm |
| J5 | 11.5Nm | |
| J4 | 11.5Nm | |
| 适用环境 | 温度 | 0~45° |
| 湿度 | 20%~80% | |
| 其他 | ||
| 示教器线缆长度 | 8米 | |
| 本体-柜体连接线长度 | 3米 | |
| I/O参数 | 数字量:16位输入,16位输出 | |
| 本体预留信号线 | 6位(胡摩尔接头) | |
| 预留气路 | – | |
| 电源容量 | 2kVA | |
| 额定功率/电压/电流 | 1.2kW/DC48V/20A | |
| 本体/电柜防护等级 | IP54/IP20 | |
| 安装方式 | 地面、侧面、倒挂 | |
| 本体/电柜重量 | 25kg/18kg | |
HSR-CO610-1400延续了CO系列协作机器人一贯的柔顺性造型设计和人体工程学设计,交互性能好,安全易用,具有更大的运动范围和更强的负载能力,适用于码垛、上下料、螺丝锁付等各类应用场景。
| 工业机器人 | HSR-CO610-1400 | |
| 自由度 | 6 | |
| 额定负载 | 10Kg | |
| 最大工作半径 | 1355mm | |
| 重复定位精度 | ±0.04mm | |
| 运动范围 | J1 | ±180° |
| J2 | -220°/+40° | |
| J3 | -55° /+235° | |
| J4 | ±180° | |
| J5 | ±130° | |
| J6 | ±180° | |
| 最高速度 | J1 | 120°/s,2.09rad/s |
| J2 | 120°/s,2.09rad/s | |
| J3 | 150°/s,2.62rad/s | |
| J4 | 225°/s,3.93rad/s | |
| J5 | 225°/s,3.93rad/s | |
| J6 | 225°/s,3.93rad/s | |
| 容许惯性矩 | J6 | 1.15kg㎡ |
| J5 | 0.90kg㎡ | |
| J4 | 0.95kg㎡ | |
| 容许扭矩 | J6 | 34Nm |
| J5 | 29Nm | |
| J4 | 30Nm | |
| 适用环境 | 温度 | 0~45° |
| 湿度 | 20%~80% | |
| 其他 | ||
| 示教器线缆长度 | 8米 | |
| 本体-柜体连接线长度 | 3米 | |
| I/O参数 | 数字量:16位输入,16位输出 | |
| 本体预留信号线 | 4位(M8插头连接) | |
| 预留气路 | – | |
| 电源容量 | 2kVA | |
| 额定功率/电压/电流 | 2kW/DC48V/30A | |
| 本体/电柜防护等级 | IP54/IP20 | |
| 安装方式 | 地面、侧面、倒挂 | |
| 本体/电柜重量 | 41kg/18kg | |
HSR-CO616-1100延续了CO系列协作机器人一贯的柔顺性造型设计和人体工程学设计,交互性能好,安全易用,具有更大的运动范围和更强的负载能力,适用于码垛、上下料、螺丝锁付等各类应用场景。
| 工业机器人 | HSR-CO616-1100 | |
| 自由度 | 6 | |
| 额定负载 | 16Kg | |
| 最大工作半径 | 1055mm | |
| 重复定位精度 | ±0.04mm | |
| 运动范围 | J1 | ±180° |
| J2 | -220°/+40° | |
| J3 | -55° /+235° | |
| J4 | ±180° | |
| J5 | ±130° | |
| J6 | ±180° | |
| 最高速度 | J1 | 120°/s,2.09rad/s |
| J2 | 120°/s,2.09rad/s | |
| J3 | 150°/s,2.62rad/s | |
| J4 | 180°/s, 3.14rad/s | |
| J5 | 180°/s, 3.14rad/s | |
| J6 | 180°/s, 3.14rad/s | |
| 容许惯性矩 | J6 | 1.54kg㎡ |
| J5 | 1.38kg㎡ | |
| J4 | 1.35kg㎡ | |
| 容许扭矩 | J6 | 49Nm |
| J5 | 46Nm | |
| J4 | 45Nm | |
| 适用环境 | 温度 | 0~45° |
| 湿度 | 20%~80% | |
| 其他 | ||
| 示教器线缆长度 | 8米 | |
| 本体-柜体连接线长度 | 3米 | |
| I/O参数 | 数字量:16位输入,16位输出 | |
| 本体预留信号线 | 4位(M8插头连接) | |
| 预留气路 | – | |
| 电源容量 | 2kVA | |
| 额定功率/电压/电流 | 2kW/DC48V/30A | |
| 本体/电柜防护等级 | IP54/IP20 | |
| 安装方式 | 地面、侧面、倒挂 | |
| 本体/电柜重量 | 38.5kg/18kg | |
…

钧舵电动真空执行器EVS01在断路器装配中的创新应用与行业价值
在智能断路器装配领域,传统气动吸盘存在定位精度低、能耗高、维护复杂等痛点。钧舵电动真空执行器EVS01通过创新的数字真空控制技术,实现±0.5kPa的真空度精准调节和50ms的极速响应,为断路器智能化装配树立了新的技术标准。
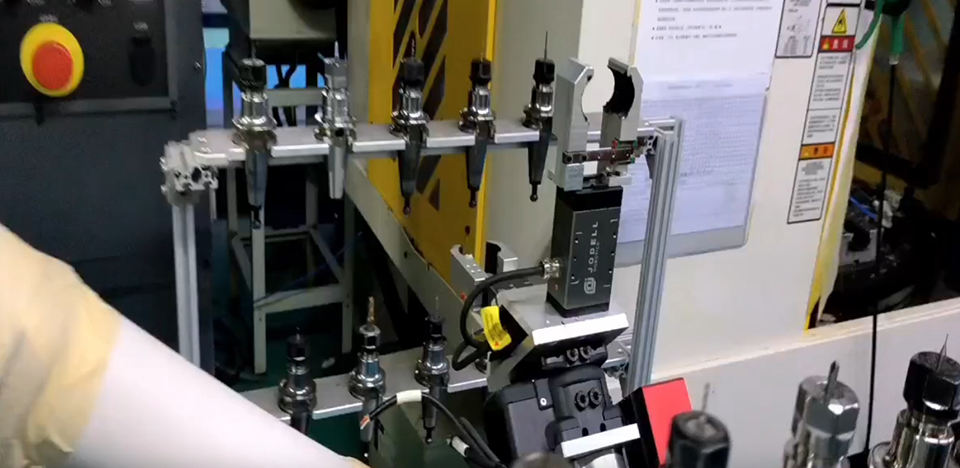
钧舵平行电动夹爪EPG40-100在CNC上下料换刀中的创新应用与行业价值
在高端数控加工领域,传统气动夹爪面临定位精度不足、换刀效率低下等核心痛点。钧舵平行电动夹爪EPG40-100通过创新的伺服直驱技术,实现±0.005mm的超高重复定位精度和0.2秒的极速响应,为CNC自动化生产树立了新的性能标杆。
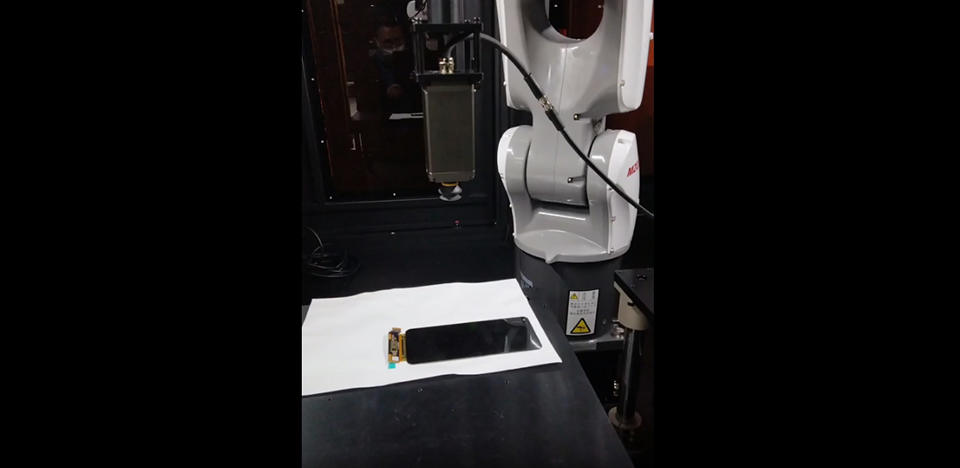
钧舵电动真空执行器EVS01在手机零部件吸取搬运中的创新应用与行业价值
在智能手机制造领域,传统气动真空系统面临能耗高、响应慢、控制精度不足等痛点。钧舵电动真空执行器EVS01通过创新的电动化真空技术,实现了-90kPa至常压的精准快速调节,单次吸取周期缩短至0.3秒,为手机精密零部件搬运设立了新的行业标准。