




2016年
成功研制出第一代灵巧手,这是公司核心技术的起点,旨在解决中国工业机器人“有臂无手”的困局。
2018年
正式成立苏州钧舵机器人有限公司,完成天使轮融资(近千万人民币),由点亮资本和泰有资本投资,主打产品为钧巧系列灵巧手。
2019年
突破电伺服夹爪关键技术,推出首款驱控一体化“电动夹爪”,正式进入工业自动化执行器市场。斩获江苏省“i创杯”大赛一等奖,并获央视报道。
2020年
钧巧系列灵巧手完成第三代研发改进。完成A轮融资(近2000万人民币),由邦盛资本、正轩资本投资。获评国家高新技术企业。
2021年
推出ERG夹取旋转系列电动夹爪,迅速成为医疗自动化行业的“爆款”产品,助力防疫工作。入选苏州市“独角兽”培育企业。
2022年
完成A+轮融资(近5000万人民币),由分享投资领投。落户东莞南城设立华南办事处,加速区域化服务。
2023年
完成B轮融资(1亿人民币),温润投资领投。公司开始向“一站式”电伺服执行器方案商转型。发布首款WEPG系列电动称重夹爪,突破锂电注液工序的高精度称重难题。
2024年
年度营收实现了超过6倍的同比增长。三大战略新品量产:丰富了在医疗、半导体、人形机器人领域的产品矩阵
2025年
钧舵机器人完成了B+轮融资,获得温润投资(温氏投资旗下)数千万人民币的注资,用于进一步技术研发和市场深耕。
钧舵客户




























最新资讯
电动夹爪 vs 气动夹爪:区别与选型全面对比
全面对比电动夹爪与气动夹爪的工作原理、精度、成本与应用场景,帮助您快速完成工业机器人夹爪选型。

六月活力启新!钧舵机器人月度精彩活动预告来袭
六月科创热潮涌动,机器人与自动化产业迎来密集交流窗口期。钧舵机器人(JODELL ROBOTICS)多点布局海内外重磅专业展会,先后登陆美国芝加哥 AUTOMATE 2026、北京第四届链博会、上海张江具身智能开发者大会三大高规格行业盛会,携灵巧机械手、工业机器人全链条解决方案集中亮相,面向全球上下游合作伙伴开放对接通道,以硬核技术链接海内外产业资源,解锁智能装备合作新机遇。

前海“数智空间”启用,首批12家优质科技企业集中入驻
此次集中入驻的北京深度制耀科技有限公司、钧舵机器人(深圳)有限公司、会芯(深圳)半导体有限公司等12家企业,多为独角兽及潜在独角兽企业,业务覆盖具身智能、机器人研发、半导体、生物科技、数据科技等前沿赛道,科创属性强、成长潜力突出。

钧舵机器人深圳子公司盛大开业! 六大据点织密全国服务网,智领电伺服执行器新征程
苏州钧舵机器人有限公司(简称 “钧舵机器人”)深圳子公司正式揭牌开业,选址前海鸿荣源中心,立足大湾区核心,辐射华南乃至全球市场。以苏州总部为核心,联动上海、深圳两大子公司及东莞、长沙、山东三大办事处,开启电伺服末端执行器领域本土化服务与全球化布局的新篇章。

重塑具身智能产业链|苏州钧舵机器人携明星产品闪耀第二届杭州国际人形机器人展
第二届杭州国际人形机器人展以 “重塑具身智能人形机器人产业链” 为核心主题,汇聚全球近 600 家领军企业、顶尖科研机构及产业链上下游力量,展览面积达 3 万平方米,集中展现人形机器人从技术迭代到产业落地的最新成果。苏州钧舵机器人有限公司(以下简称 “钧舵机器人”)携旗下多款核心产品重磅亮相核心零部件展区.

钧舵机器人(JODELL Robotics)正式设立德国办事处,加速欧洲市场战略布局
钧舵机器人(JODELL Robotics)今日宣布,正式在德国工业重镇罗伊特林根(Reutlingen)设立德国办事处,标志着公司全球化战略迈出关键一步,将为欧洲客户提供更高效、更贴近本地的自动化解决方案与技术支持。

CIBF2026首日盛况,钧舵机器人燃爆登场!
作为国内领先的“一站式电伺服执行器产品供应商”,钧舵机器人在此次行业盛会上展现了其在智能制造领域全方位的创新实力。展会开场没多久,钧舵的展位前便迎来了络绎不绝的专业观众。热烈而深入的交流对话,全面展现了钧舵“聚力创新,驱动卓越”的企业理念。
钧舵机器人将亮相 CIBF2026 深圳电池展,锂电自动化末端执行器解决方案引关注
苏州钧舵机器人有限公司(下称 “钧舵机器人”)宣布,将携锂电行业专用智能末端执行器解决方案,重磅参展第十八届深圳国际电池技术交流会 / 展览会(CIBF2026)。展会将于2026 年 5 月 13 日 – 15 日在深圳国际会展中心(宝安区)举办,钧舵机器人展位号为16T060-1,诚邀全球锂电产业链客户、行业伙伴莅临展台,共探新能源自动化技术创新与产业落地新路径。
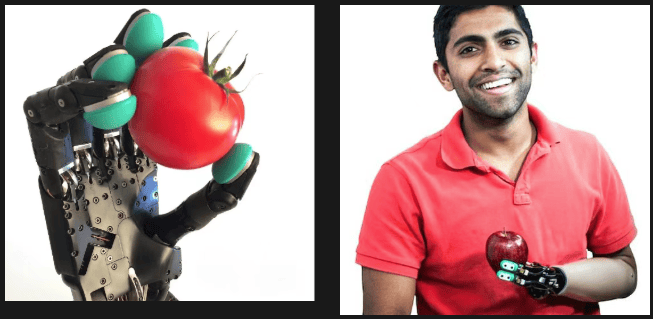
钧舵机器人能够生产Shadow Hand同款BioTac触觉传感器
钧舵机器人正式对外披露已经与美国著名触觉传感器公司SynTouch的创始人Gerald E.Loeb教授达成独家科学顾问合作协议,双方在全球领先的类人触觉传感器BioTac基础上已经在联合开发全新一代类人触觉传感技术,最快于2026年下半年在苏州量产。这意味着,中国能够生产Shadow Hand同款BioTac触觉传感器的企业正式诞生。

EPG-FX12-002
EPG-FX12-002微型电动夹爪,0.5–2N低力控制,±0.02mm高精度,0.15s高速响应,支持Modbus RTU与I/O控制,适用于电子制造与精密自动化应用。

EPG-T系列
EPG-T系列产品概述 EPG-T系列是一款专为工业自动化、机器人搬运、重载抓取和智能制造场景设计的大负载电动平行夹爪。产品采用高刚性结构设计,最大单指夹持力可达1200N,支持80mm至200mm多…

RAG系列
RAG系列自适应电动夹爪是Jodell Robotics推出的智能机器人末端执行器,采用驱控一体化设计,支持CAN FD通讯协议,集高精度、高响应速度和智能控制于一体。产品具有0~100mm连续可调行程、6~65N夹持力以及±0.03mm重复精度,可满足电子制造、自动上下料、协作机器人、物流分拣等柔性自动化应用需求。

EPG-ST系列
EPG-ST系列微型电动夹爪是一款专为精密自动化与轻量化应用场景设计的紧凑型机器人电动夹爪。该系列产品以体积小、响应快、高精度为核心优势,集成驱控一体化结构,适用于空间受限的自动化设备及协作机器人末端执行器应用。EPG-ST系列在微小工件抓取、精密装配及高速分拣等领域表现出色,是实现高效柔性自动化的重要组件。

ERG-HP系列
ERG-HP系列旋转电动夹爪是一款集夹持与旋转功能于一体的高性能机器人末端执行器,专为协作机器人及工业自动化应用设计。该系列产品通过驱控一体化设计,实现夹持与旋转的高度集成,支持无限旋转、零背隙、高精度控制,广泛应用于精密装配、检测、分拣及复杂工艺流程中。
EPG-L 系列
探索超薄超大行程电动夹爪如何通过其紧凑结构与宽广工作域,解决3C、半导体等行业的多规格工件抓取难题。本文深度解析其技术原理、优势及如何提升产线柔性。

钧舵 LRA 系列
钧舵LRA系列是全球首创的电动旋转-直线复合执行器,通过革命性的双伺服直驱技术,在单一模块内实现**直线运动(±0.005mm)与旋转运动(±0.02°)**的精准协同,为精密装配、光学调校、半导体封装等场景提供终极运动解决方案。
电动旋转直线模组、复合运动执行器、直驱定位系统、高精度对位平台、机电一体化执行机构
获取报价
欢迎您的咨询
我们会在当日将报价单发给您!